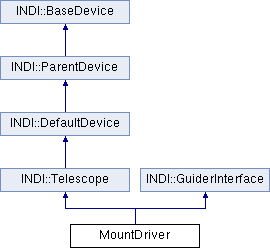
The MountDriver class provides a simple example for development of a new mount driver. Modify the driver to fit your needs. More...
#include <mount_driver.h>
Public Member Functions | |
| MountDriver () | |
| virtual const char * | getDefaultName () override |
| virtual bool | initProperties () override |
| Called to initialize basic properties required all the time. More... | |
| virtual bool | updateProperties () override |
| Called when connected state changes, to add/remove properties. More... | |
| virtual bool | ISNewNumber (const char *dev, const char *name, double values[], char *names[], int n) override |
| Process the client newNumber command. More... | |
 Public Member Functions inherited from INDI::Telescope Public Member Functions inherited from INDI::Telescope | |
| Telescope () | |
| virtual | ~Telescope () |
| virtual bool | ISNewText (const char *dev, const char *name, char *texts[], char *names[], int n) override |
| Process the client newSwitch command. More... | |
| virtual bool | ISNewSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) override |
| Process the client newSwitch command. More... | |
| virtual void | ISGetProperties (const char *dev) override |
| define the driver's properties to the client. Usually, only a minimum set of properties are defined to the client in this function if the device is in disconnected state. Those properties should be enough to enable the client to establish a connection to the device. In addition to CONNECT/DISCONNECT, such properties may include port name, IP address, etc. You should check if the device is already connected, and if this is true, then you must define the remainder of the the properties to the client in this function. Otherwise, the remainder of the driver's properties are defined to the client in updateProperties() function which is called when a client connects/disconnects from a device. More... | |
| virtual bool | ISSnoopDevice (XMLEle *root) override |
| Process a snoop event from INDI server. This function is called when a snooped property is updated in a snooped driver. More... | |
| uint32_t | GetTelescopeCapability () const |
| GetTelescopeCapability returns the capability of the Telescope. More... | |
| void | SetTelescopeCapability (uint32_t cap, uint8_t slewRateCount) |
| SetTelescopeCapability sets the Telescope capabilities. All capabilities must be initialized. More... | |
| bool | CanGOTO () |
| bool | CanSync () |
| bool | CanFlip () |
| bool | CanAbort () |
| bool | CanPark () |
| bool | CanControlTrack () |
| bool | HasTime () |
| bool | HasLocation () |
| bool | HasPierSide () |
| bool | HasPierSideSimulation () |
| bool | CanTrackSatellite () |
| bool | HasPECState () |
| bool | HasTrackMode () |
| bool | HasTrackRate () |
| virtual void | TimerHit () override |
| Called when setTimer() time is up. More... | |
| void | SetParkDataType (TelescopeParkData type) |
| setParkDataType Sets the type of parking data stored in the park data file and presented to the user. More... | |
| bool | InitPark () |
| InitPark Loads parking data (stored in ~/.indi/ParkData.xml) that contains parking status and parking position. More... | |
| bool | isParked () |
| isParked is mount currently parked? More... | |
| virtual void | SetParked (bool isparked) |
| SetParked Change the mount parking status. The data park file (stored in ~/.indi/ParkData.xml) is updated in the process. More... | |
| double | GetAxis1Park () const |
| double | GetAxis1ParkDefault () const |
| double | GetAxis2Park () const |
| double | GetAxis2ParkDefault () const |
| void | SetAxis1Park (double value) |
| SetRAPark Set current RA/AZ parking position. The data park file (stored in ~/.indi/ParkData.xml) is updated in the process. More... | |
| void | SetAxis1ParkDefault (double steps) |
| SetRAPark Set default RA/AZ parking position. More... | |
| void | SetAxis2Park (double steps) |
| SetDEPark Set current DEC/ALT parking position. The data park file (stored in ~/.indi/ParkData.xml) is updated in the process. More... | |
| void | SetAxis2ParkDefault (double steps) |
| SetDEParkDefault Set default DEC/ALT parking position. More... | |
| bool | isLocked () const |
| isLocked is mount currently locked? More... | |
| void | setTelescopeConnection (const uint8_t &value) |
| setTelescopeConnection Set telescope connection mode. Child class should call this in the constructor before Telescope registers any connection interfaces More... | |
| uint8_t | getTelescopeConnection () const |
| void | setPierSide (TelescopePierSide side) |
| TelescopePierSide | getPierSide () |
| void | setPECState (TelescopePECState state) |
| TelescopePECState | getPECState () |
| Public Member Functions inherited from INDI::DefaultDevice | |
| DefaultDevice () | |
| virtual | ~DefaultDevice () override=default |
| void | addAuxControls () |
| Add Debug, Simulation, and Configuration options to the driver. More... | |
| void | addDebugControl () |
| Add Debug control to the driver. More... | |
| void | addSimulationControl () |
| Add Simulation control to the driver. More... | |
| void | addConfigurationControl () |
| Add Configuration control to the driver. More... | |
| void | addPollPeriodControl () |
| Add Polling period control to the driver. More... | |
| void | resetProperties () |
| Set all properties to IDLE state. More... | |
| void | defineNumber (INumberVectorProperty *nvp) |
| Define number vector to client & register it. Alternatively, IDDefNumber can be used but the property will not get registered and the driver will not be able to save configuration files. More... | |
| void | defineProperty (INumberVectorProperty *property) |
| void | defineText (ITextVectorProperty *tvp) |
| Define text vector to client & register it. Alternatively, IDDefText can be used but the property will not get registered and the driver will not be able to save configuration files. More... | |
| void | defineProperty (ITextVectorProperty *property) |
| void | defineSwitch (ISwitchVectorProperty *svp) |
| Define switch vector to client & register it. Alternatively, IDDefswitch can be used but the property will not get registered and the driver will not be able to save configuration files. More... | |
| void | defineProperty (ISwitchVectorProperty *property) |
| void | defineLight (ILightVectorProperty *lvp) |
| Define light vector to client & register it. Alternatively, IDDeflight can be used but the property will not get registered and the driver will not be able to save configuration files. More... | |
| void | defineProperty (ILightVectorProperty *property) |
| void | defineBLOB (IBLOBVectorProperty *bvp) |
| Define BLOB vector to client & register it. Alternatively, IDDefBLOB can be used but the property will not get registered and the driver will not be able to save configuration files. More... | |
| void | defineProperty (IBLOBVectorProperty *property) |
| void | defineProperty (INDI::Property &property) |
| virtual bool | deleteProperty (const char *propertyName) |
| Delete a property and unregister it. It will also be deleted from all clients. More... | |
| bool | deleteProperty (INDI::Property &property) |
| deleteProperty Delete a property and unregister it. It will also be deleted from all clients. More... | |
| virtual void | setConnected (bool status, IPState state=IPS_OK, const char *msg=nullptr) |
| Set connection switch status in the client. More... | |
| int | SetTimer (uint32_t ms) |
| Set a timer to call the function TimerHit after ms milliseconds. More... | |
| void | RemoveTimer (int id) |
| Remove timer added with SetTimer. More... | |
| virtual const char * | getDriverExec () |
| virtual const char * | getDriverName () |
| void | setVersion (uint16_t vMajor, uint16_t vMinor) |
| Set driver version information to be defined in DRIVER_INFO property as vMajor.vMinor. More... | |
| uint16_t | getMajorVersion () const |
| uint16_t | getMinorVersion () const |
| virtual bool | ISNewBLOB (const char *dev, const char *name, int sizes[], int blobsizes[], char *blobs[], char *formats[], char *names[], int n) |
| Process the client newBLOB command. More... | |
| uint16_t | getDriverInterface () const |
| void | setDriverInterface (uint16_t value) |
| setInterface Set driver interface. By default the driver interface is set to GENERAL_DEVICE. You may send an ORed list of DeviceInterface values. More... | |
| void | watchDevice (const char *deviceName, const std::function< void(INDI::BaseDevice)> &callback) |
| Add a device to the watch list. More... | |
| Public Member Functions inherited from INDI::ParentDevice | |
| ParentDevice (Type type) | |
| ~ParentDevice () | |
| ParentDevice (ParentDevice &&other)=default | |
| ParentDevice & | operator= (ParentDevice &&other)=default |
| Public Member Functions inherited from INDI::BaseDevice | |
| BaseDevice () | |
| virtual | ~BaseDevice () |
| void | registerProperty (const INDI::Property &property) |
| Register the property to be able to observe and update. More... | |
| void | registerProperty (const INDI::Property &property, INDI_PROPERTY_TYPE type) |
| int | removeProperty (const char *name, char *errmsg) |
| Remove a property. More... | |
| void | watchProperty (const char *name, const std::function< void(INDI::Property)> &callback, WATCH watch=WATCH_NEW) |
| Call the callback function if property is available. More... | |
| Property | getProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) const |
| Return a property and its type given its name. More... | |
| Properties | getProperties () |
| Return a list of all properties in the device. More... | |
| const Properties | getProperties () const |
| INDI::PropertyNumber | getNumber (const char *name) const |
| INDI::PropertyText | getText (const char *name) const |
| INDI::PropertySwitch | getSwitch (const char *name) const |
| INDI::PropertyLight | getLight (const char *name) const |
| INDI::PropertyBlob | getBLOB (const char *name) const |
| IPState | getPropertyState (const char *name) const |
| IPerm | getPropertyPermission (const char *name) const |
| void * | getRawProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) const |
| Return a property and its type given its name. More... | |
| void | addMessage (const std::string &msg) |
| Add message to the driver's message queue. More... | |
| void | checkMessage (XMLEle *root) |
| void | doMessage (XMLEle *msg) |
| const std::string & | messageQueue (size_t index) const |
| const std::string & | lastMessage () const |
| bool | isValid () const |
| bool | isConnected () const |
| void | attach () |
| indicates that the device is ready More... | |
| void | detach () |
| indicates that the device is being removed More... | |
| void | setMediator (INDI::BaseMediator *mediator) |
| Set the driver's mediator to receive notification of news devices and updated property values. More... | |
| INDI::BaseMediator * | getMediator () const |
| void | setDeviceName (const char *dev) |
| Set the device name. More... | |
| const char * | getDeviceName () const |
| bool | isDeviceNameMatch (const char *otherName) const |
| Check that the device name matches the argument. More... | |
| bool | isDeviceNameMatch (const std::string &otherName) const |
| Check that the device name matches the argument. More... | |
| const char * | getDriverName () const |
| const char * | getDriverExec () const |
| const char * | getDriverVersion () const |
| uint16_t | getDriverInterface () const |
| getDriverInterface returns ORed values of DRIVER_INTERFACE. It presents the device classes supported by the driver. More... | |
| bool | buildSkeleton (const char *filename) |
| Build driver properties from a skeleton file. More... | |
| int | buildProp (const INDI::LilXmlElement &root, char *errmsg, bool isDynamic=false) |
| Build a property given the supplied XML element (defXXX) More... | |
| int | setValue (const INDI::LilXmlElement &root, char *errmsg) |
| handle SetXXX commands from client More... | |
| operator BaseDevice * () | |
| BaseDevice * | operator-> () |
| bool | operator!= (std::nullptr_t) const |
| bool | operator== (std::nullptr_t) const |
| operator bool () const | |
| operator bool () | |
| Public Member Functions inherited from INDI::GuiderInterface | |
| virtual void | GuideComplete (INDI_EQ_AXIS axis) |
| Call GuideComplete once the guiding pulse is complete. More... | |
Protected Member Functions | |
| virtual bool | Handshake () override |
| Communication Commands. More... | |
| virtual bool | ReadScopeStatus () override |
| ReadScopeStatus Query the mount status, coordinate, any status indicators, pier side..etc. More... | |
| virtual bool | MoveNS (INDI_DIR_NS dir, TelescopeMotionCommand command) override |
| Motions commands. More... | |
| virtual bool | MoveWE (INDI_DIR_WE dir, TelescopeMotionCommand command) override |
| MoveWE Start or Stop motion in the East/West RA Axis. More... | |
| virtual bool | Abort () override |
| Abort Abort all motion. If tracking, stop it. More... | |
| virtual IPState | GuideNorth (uint32_t ms) override |
| Pulse Guiding Commands. More... | |
| virtual IPState | GuideSouth (uint32_t ms) override |
| Guide south for ms milliseconds. South is defined as DEC-. More... | |
| virtual IPState | GuideEast (uint32_t ms) override |
| Guide east for ms milliseconds. East is defined as RA+. More... | |
| virtual IPState | GuideWest (uint32_t ms) override |
| Guide west for ms milliseconds. West is defined as RA-. More... | |
| virtual bool | SetTrackMode (uint8_t mode) override |
| Tracking Commands. More... | |
| virtual bool | SetTrackEnabled (bool enabled) override |
| SetTrackEnabled Engages or disengages mount tracking. If there are no tracking modes available, it is assumed sidereal. Otherwise, whatever tracking mode should be activated or deactivated accordingly. More... | |
| virtual bool | SetTrackRate (double raRate, double deRate) override |
| SetTrackRate Set custom tracking rates. More... | |
| virtual bool | Goto (double RA, double DE) override |
| GOTO & Sync commands. More... | |
| virtual bool | Sync (double RA, double DE) override |
| Set the telescope current RA and DEC coordinates to the supplied RA and DEC coordinates. More... | |
| virtual bool | updateLocation (double latitude, double longitude, double elevation) override |
| Time, Date & Location commands. More... | |
| virtual bool | Park () override |
| Parking commands. More... | |
| virtual bool | UnPark () override |
| Unpark the telescope if already parked. More... | |
| virtual bool | SetCurrentPark () override |
| SetCurrentPark Set current coordinates/encoders value as the desired parking position. More... | |
| virtual bool | SetDefaultPark () override |
| SetDefaultPark Set default coordinates/encoders value as the desired parking position. More... | |
| bool | sendCommand (const char *cmd, char *res=nullptr, int cmd_len=-1, int res_len=-1) |
| Utility Functions. More... | |
| void | hexDump (char *buf, const char *data, int size) |
| hexDump Helper function to print non-string commands to the logger so it is easier to debug More... | |
| Protected Member Functions inherited from INDI::Telescope | |
| virtual bool | saveConfigItems (FILE *fp) override |
| saveConfigItems Save specific properties in the provide config file handler. Child class usually override this function to save their own properties and the base class saveConfigItems(fp) must be explicitly called by each child class. The Default Device saveConfigItems(fp) only save Debug properties options in the config file. More... | |
| void | NewRaDec (double ra, double dec) |
| The child class calls this function when it has updates. More... | |
| virtual bool | Flip (double ra, double dec) |
| Move and flip the scope to the supplied RA and DEC coordinates. More... | |
| virtual int | AddTrackMode (const char *name, const char *label, bool isDefault=false) |
| AddTrackMode. More... | |
| virtual bool | updateTime (ln_date *utc, double utc_offset) |
| Update telescope time, date, and UTC offset. More... | |
| void | updateObserverLocation (double latitude, double longitude, double elevation) |
| Update location settings of the observer. More... | |
| virtual bool | SetParkPosition (double Axis1Value, double Axis2Value) |
| SetParkPosition Set desired parking position to the supplied value. This ONLY sets the desired park position value and does not perform parking. More... | |
| virtual void | SyncParkStatus (bool isparked) |
| SyncParkStatus Update the state and switches for parking. More... | |
| virtual bool | SetSlewRate (int index) |
| SetSlewRate Set desired slew rate index. More... | |
| bool | callHandshake () |
| callHandshake Helper function that sets the port file descriptor before calling the actual Handshake function implenented in drivers More... | |
| void | processNSWE (double mag, double angle) |
| void | processJoystick (const char *joystick_n, double mag, double angle) |
| void | processAxis (const char *axis_n, double value) |
| void | processSlewPresets (double mag, double angle) |
| void | processButton (const char *button_n, ISState state) |
| TelescopePierSide | expectedPierSide (double ra) |
| Calculate the expected pier side for scopes that do not report this property themselves. More... | |
| bool | LoadScopeConfig () |
| Load scope settings from XML files. More... | |
| bool | HasDefaultScopeConfig () |
| Load scope settings from XML files. More... | |
| bool | UpdateScopeConfig () |
| Save scope settings to XML files. More... | |
| std::string | GetHomeDirectory () const |
| Validate a file name. More... | |
| int | GetScopeConfigIndex () const |
| Get the scope config index. More... | |
| bool | CheckFile (const std::string &file_name, bool writable) const |
| Check if a file exists and it is readable. More... | |
| void | sendTimeFromSystem () |
| bool | getSimulatePierSide () const |
| void | setSimulatePierSide (bool value) |
| const char * | getPierSideStr (TelescopePierSide ps) |
| const char * | LoadParkData () |
| bool | WriteParkData () |
| bool | PurgeParkData () |
| Protected Member Functions inherited from INDI::DefaultDevice | |
| void | setDynamicPropertiesBehavior (bool defineEnabled, bool deleteEnabled) |
| setDynamicPropertiesBehavior controls handling of dynamic properties. Dyanmic properties are those generated from an external skeleton XML file. By default all properties, including dynamic properties, are defined to the client in ISGetProperties(). Furthermore, when űdeleteProperty(properyName) is called, the dynamic property is deleted by default, and can only be restored by calling buildSkeleton(filename) again. However, it is sometimes desirable to skip the definition of the dynamic properties on startup and delegate this task to the child class. To control this behavior, set enabled to false. More... | |
| virtual bool | loadConfig (bool silent=false, const char *property=nullptr) |
| Load the last saved configuration file. More... | |
| bool | loadConfig (INDI::Property &property) |
| Load property config from the configuration file. If the property configuration is successfully parsed, the corresponding ISNewXXX is called with the values parsed from the config file. More... | |
| virtual bool | saveConfig (bool silent=false, const char *property=nullptr) |
| Save the current properties in a configuration file. More... | |
| bool | saveConfig (INDI::Property &property) |
| Save a property in the configuration file. More... | |
| virtual bool | purgeConfig () |
| purgeConfig Remove config file from disk. More... | |
| virtual bool | saveAllConfigItems (FILE *fp) |
| saveAllConfigItems Save all the drivers' properties in the configuration file More... | |
| virtual bool | loadDefaultConfig () |
| Load the default configuration file. More... | |
| void | setDebug (bool enable) |
| Toggle driver debug status A driver can be more verbose if Debug option is enabled by the client. More... | |
| void | setSimulation (bool enable) |
| Toggle driver simulation status A driver can run in simulation mode if Simulation option is enabled by the client. More... | |
| virtual void | debugTriggered (bool enable) |
| Inform driver that the debug option was triggered. This function is called after setDebug is triggered by the client. Reimplement this function if your driver needs to take specific action after debug is enabled/disabled. Otherwise, you can use isDebug() to check if simulation is enabled or disabled. More... | |
| virtual void | simulationTriggered (bool enable) |
| Inform driver that the simulation option was triggered. This function is called after setSimulation is triggered by the client. Reimplement this function if your driver needs to take specific action after simulation is enabled/disabled. Otherwise, you can use isSimulation() to check if simulation is enabled or disabled. More... | |
| bool | isDebug () const |
| bool | isSimulation () const |
| virtual bool | Connect () |
| Connect to the device. INDI::DefaultDevice implementation connects to appropriate connection interface (Serial or TCP) governed by connectionMode. If connection is successful, it proceed to call Handshake() function to ensure communication with device is successful. For other communication interface, override the method in the child class implementation. More... | |
| virtual bool | Disconnect () |
| Disconnect from device. More... | |
| void | registerConnection (Connection::Interface *newConnection) |
| registerConnection Add new connection plugin to the existing connection pool. The connection type shall be defined to the client in ISGetProperties() More... | |
| bool | unRegisterConnection (Connection::Interface *existingConnection) |
| unRegisterConnection Remove connection from existing pool More... | |
| Connection::Interface * | getActiveConnection () |
| void | setActiveConnection (Connection::Interface *existingConnection) |
| setActiveConnection Switch the active connection to the passed connection plugin More... | |
| void | setDefaultPollingPeriod (uint32_t msec) |
| setDefaultPollingPeriod Change the default polling period to call TimerHit() function in the driver. More... | |
| void | setPollingPeriodRange (uint32_t minimum, uint32_t maximum) |
| setPollingPeriodRange Set the range permitted by the polling range in milliseconds More... | |
| uint32_t | getPollingPeriod () const |
| getPollingPeriod Return the polling period. More... | |
| void | setCurrentPollingPeriod (uint32_t msec) |
| setCurrentPollingPeriod Change the current polling period to call TimerHit() function in the driver. More... | |
| uint32_t | getCurrentPollingPeriod () const |
| getCurrentPollingPeriod Return the current polling period. More... | |
| uint32_t & | refCurrentPollingPeriod () __attribute__((deprecated)) |
| uint32_t | refCurrentPollingPeriod () const __attribute__((deprecated)) |
| bool | isConfigLoading () const |
| isConfigLoading Check if driver configuration is currently in the process of getting loaded. More... | |
| bool | isInitializationComplete () const |
| isInitializationComplete Check if driver initialization is complete. More... | |
| void | syncDriverInfo () |
| syncDriverInfo sends the current driver information to the client. More... | |
| DefaultDevice (const std::shared_ptr< DefaultDevicePrivate > &dd) | |
| Protected Member Functions inherited from INDI::ParentDevice | |
| ParentDevice (const std::shared_ptr< ParentDevicePrivate > &dd) | |
| Protected Member Functions inherited from INDI::BaseDevice | |
| BaseDevice (BaseDevicePrivate &dd) | |
| BaseDevice (const std::shared_ptr< BaseDevicePrivate > &dd) | |
| Protected Member Functions inherited from INDI::GuiderInterface | |
| GuiderInterface () | |
| ~GuiderInterface () | |
| void | initGuiderProperties (const char *deviceName, const char *groupName) |
| Initilize guider properties. It is recommended to call this function within initProperties() of your primary device. More... | |
| void | processGuiderProperties (const char *name, double values[], char *names[], int n) |
| Call this function whenever client updates GuideNSNP or GuideWSP properties in the primary device. This function then takes care of issuing the corresponding GuideXXXX function accordingly. More... | |
Detailed Description
The MountDriver class provides a simple example for development of a new mount driver. Modify the driver to fit your needs.
It supports the following features:
- Sideral and Custom Tracking rates.
- Goto & Sync
- NWSE Hand controller direciton key slew.
- Tracking On/Off.
- Parking & Unparking with custom parking positions.
- Setting Time & Location.
On startup and by default the mount shall point to the celestial pole.
Definition at line 40 of file mount_driver.h.
Constructor & Destructor Documentation
◆ MountDriver()
| MountDriver::MountDriver | ( | ) |
Definition at line 34 of file mount_driver.cpp.
Member Function Documentation
◆ Abort()
|
overrideprotectedvirtual |
Abort Abort all motion. If tracking, stop it.
- Returns
- True if successful, false otherwise.
Reimplemented from INDI::Telescope.
Definition at line 277 of file mount_driver.cpp.
◆ getDefaultName()
|
overridevirtual |
- Returns
- Default name of the device.
Implements INDI::DefaultDevice.
Definition at line 49 of file mount_driver.cpp.
◆ Goto()
|
overrideprotectedvirtual |
GOTO & Sync commands.
Reimplemented from INDI::Telescope.
Definition at line 197 of file mount_driver.cpp.
◆ GuideEast()
|
overrideprotectedvirtual |
Guide east for ms milliseconds. East is defined as RA+.
- Returns
- IPS_OK if operation is completed successfully, IPS_BUSY if operation will take take to complete, or IPS_ALERT if operation failed.
Implements INDI::GuiderInterface.
Definition at line 323 of file mount_driver.cpp.
◆ GuideNorth()
|
overrideprotectedvirtual |
Pulse Guiding Commands.
Implements INDI::GuiderInterface.
Definition at line 311 of file mount_driver.cpp.
◆ GuideSouth()
|
overrideprotectedvirtual |
Guide south for ms milliseconds. South is defined as DEC-.
- Returns
- IPS_OK if operation is completed successfully, IPS_BUSY if operation will take take to complete, or IPS_ALERT if operation failed.
Implements INDI::GuiderInterface.
Definition at line 317 of file mount_driver.cpp.
◆ GuideWest()
|
overrideprotectedvirtual |
Guide west for ms milliseconds. West is defined as RA-.
- Returns
- IPS_OK if operation is completed successfully, IPS_BUSY if operation will take take to complete, or IPS_ALERT if operation failed.
Implements INDI::GuiderInterface.
Definition at line 329 of file mount_driver.cpp.
◆ Handshake()
|
overrideprotectedvirtual |
Communication Commands.
Handshake Attempt communication with the mount.
- Returns
- true if successful, false otherwise.
Reimplemented from INDI::Telescope.
Definition at line 140 of file mount_driver.cpp.
◆ hexDump()
|
protected |
hexDump Helper function to print non-string commands to the logger so it is easier to debug
- Parameters
-
buf buffer to format the command into hex strings. data the command size length of the command in bytes.
- Note
- This is called internally by sendCommand, no need to call it directly.
Definition at line 473 of file mount_driver.cpp.
◆ initProperties()
|
overridevirtual |
Called to initialize basic properties required all the time.
Reimplemented from INDI::Telescope.
Definition at line 54 of file mount_driver.cpp.
◆ ISNewNumber()
|
overridevirtual |
Process the client newNumber command.
- Note
- This function is called by the INDI framework, do not call it directly.
- Returns
- True if any property was successfully processed, false otherwise.
Reimplemented from INDI::Telescope.
Definition at line 251 of file mount_driver.cpp.
◆ MoveNS()
|
overrideprotectedvirtual |
Motions commands.
MoveNS Start or Stop motion in the North/South DEC Axis.
- Parameters
-
dir Direction command Start or Stop
- Returns
- true if successful, false otherwise.
Reimplemented from INDI::Telescope.
Definition at line 283 of file mount_driver.cpp.
◆ MoveWE()
|
overrideprotectedvirtual |
MoveWE Start or Stop motion in the East/West RA Axis.
- Parameters
-
dir Direction command Start or Stop
- Returns
- true if successful, false otherwise.
Reimplemented from INDI::Telescope.
Definition at line 297 of file mount_driver.cpp.
◆ Park()
|
overrideprotectedvirtual |
Parking commands.
Reimplemented from INDI::Telescope.
Definition at line 237 of file mount_driver.cpp.
◆ ReadScopeStatus()
|
overrideprotectedvirtual |
ReadScopeStatus Query the mount status, coordinate, any status indicators, pier side..etc.
- Returns
- True if query is successful, false otherwise.
Implements INDI::Telescope.
Definition at line 159 of file mount_driver.cpp.
◆ sendCommand()
|
protected |
Utility Functions.
sendCommand Send a string command to device.
- Parameters
-
cmd Command to be sent. Can be either NULL TERMINATED or just byte buffer. res If not nullptr, the function will wait for a response from the device. If nullptr, it returns true immediately after the command is successfully sent. cmd_len if -1, it is assumed that the cmd is a null-terminated string. Otherwise, it would write cmd_len bytes from the cmd buffer. res_len if -1 and if res is not nullptr, the function will read until it detects the default delimeter DRIVER_STOP_CHAR up to DRIVER_LEN length. Otherwise, the function will read res_len from the device and store it in res.
- Returns
- True if successful, false otherwise.
Definition at line 414 of file mount_driver.cpp.
◆ SetCurrentPark()
|
overrideprotectedvirtual |
SetCurrentPark Set current coordinates/encoders value as the desired parking position.
- Returns
- True if current mount coordinates are set as parking position, false on error.
- Note
- If not implemented by the child class, this function by default returns false with a warning message.
Reimplemented from INDI::Telescope.
Definition at line 353 of file mount_driver.cpp.
◆ SetDefaultPark()
|
overrideprotectedvirtual |
SetDefaultPark Set default coordinates/encoders value as the desired parking position.
- Returns
- True if default park coordinates are set as parking position, false on error.
- Note
- If not implemented by the child class, this function by default returns false with a warning message.
Reimplemented from INDI::Telescope.
Definition at line 370 of file mount_driver.cpp.
◆ SetTrackEnabled()
|
overrideprotectedvirtual |
SetTrackEnabled Engages or disengages mount tracking. If there are no tracking modes available, it is assumed sidereal. Otherwise, whatever tracking mode should be activated or deactivated accordingly.
- Parameters
-
enabled True to engage tracking, false to stop tracking completely.
- Returns
- True if successful, false otherwise
- Note
- If not implemented by the child class, this function by default returns false with a warning message.
Reimplemented from INDI::Telescope.
Definition at line 398 of file mount_driver.cpp.
◆ SetTrackMode()
|
overrideprotectedvirtual |
Tracking Commands.
Reimplemented from INDI::Telescope.
Definition at line 389 of file mount_driver.cpp.
◆ SetTrackRate()
|
overrideprotectedvirtual |
SetTrackRate Set custom tracking rates.
- Parameters
-
raRate RA tracking rate in arcsecs/s deRate DEC tracking rate in arcsecs/s
- Returns
- True if successful, false otherwise
- Note
- If not implemented by the child class, this function by default returns false with a warning message.
Reimplemented from INDI::Telescope.
Definition at line 406 of file mount_driver.cpp.
◆ Sync()
|
overrideprotectedvirtual |
Set the telescope current RA and DEC coordinates to the supplied RA and DEC coordinates.
- Returns
- True if successful, false otherwise
- Note
- If not implemented by the child class, this function by default returns false with a warning message.
Reimplemented from INDI::Telescope.
Definition at line 219 of file mount_driver.cpp.
◆ UnPark()
|
overrideprotectedvirtual |
Unpark the telescope if already parked.
- Returns
- True if successful, false otherwise
- Note
- If not implemented by the child class, this function by default returns false with a warning message.
Reimplemented from INDI::Telescope.
Definition at line 245 of file mount_driver.cpp.
◆ updateLocation()
|
overrideprotectedvirtual |
Time, Date & Location commands.
Reimplemented from INDI::Telescope.
Definition at line 335 of file mount_driver.cpp.
◆ updateProperties()
|
overridevirtual |
Called when connected state changes, to add/remove properties.
Reimplemented from INDI::Telescope.
Definition at line 103 of file mount_driver.cpp.
The documentation for this class was generated from the following files: