



hi dusan!
thank you for your effort - i made a little walkthrough video - hope it helps others:
Setting up a PI 4 & 5 for use with INDI
yours wolfi
Read More...
hi!
i am running kstars and ekos on ubuntu jammy, and the indiserver for a toupcam and an ASI guider camera is running on a raspberry pi. the NUC doing ubuntu is connectred via ethernet ro the raspi.
- i start the INDIserver,a dn it connects to the DS 2600 toupcam
- shortly after that, i get the following message:
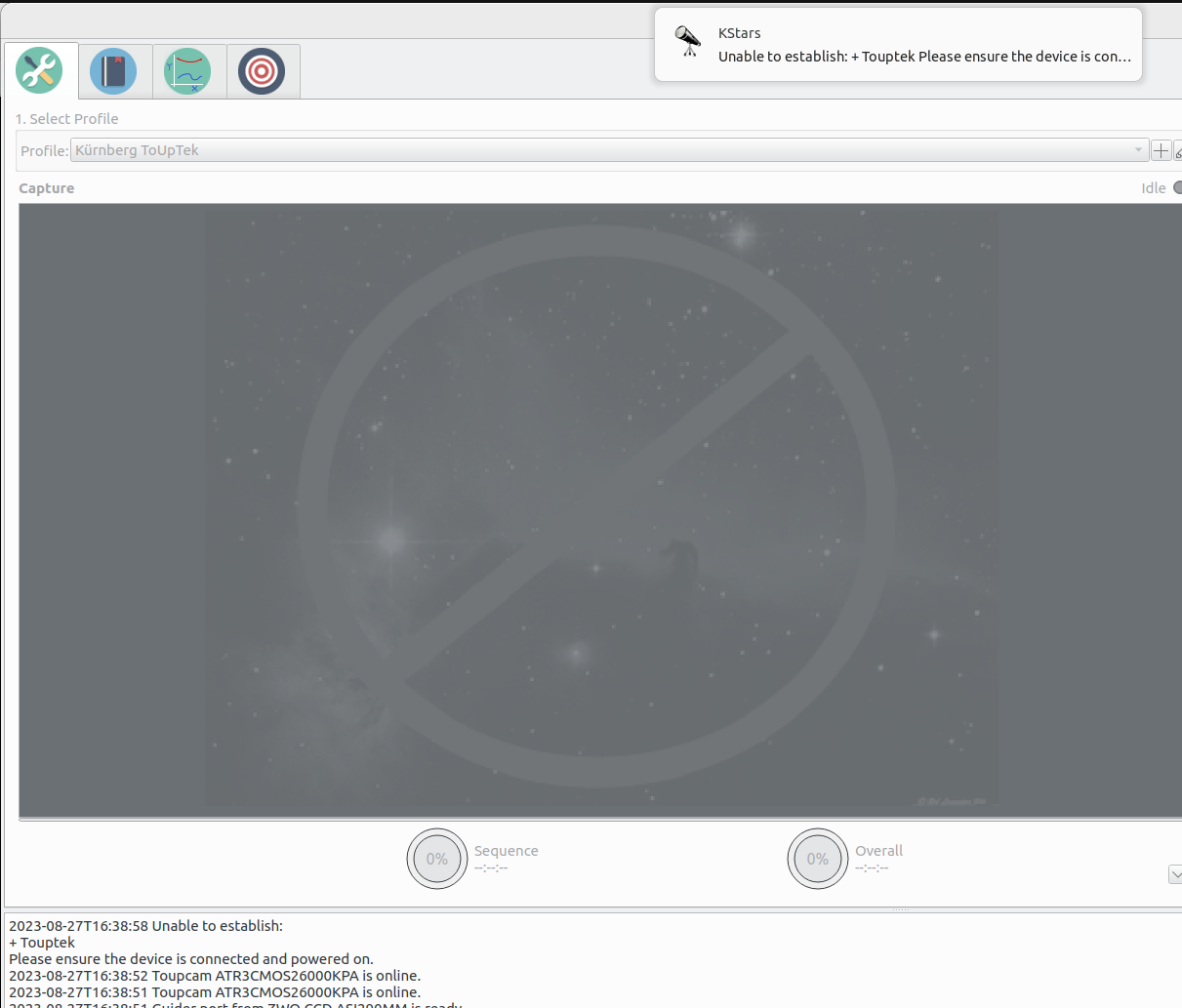
and no camera is available ...
thing go well, however, when i connect an ASI 1600 MM ... does anyone know this problem. what can i do?
yours wolfi
Read More...
hi!
it is not all that horrible, fortunately - not every USB 3 hub works, but there is trouble sometimes. the zwo asi and the touptek work fine on the raspberry pi4. however, the dongle/focuser issue happens on the NUC and i do not assume that there is a power problem there ...
can it be that the dongle and the falcon are apparently HIDs????
yours wolfi
Read More...
hi!
I have not found anything in the search, so i am asking here:
I have a problem with multiple USB devices .
- if i run a ublox gps dongle and a focuser connected to /dev/usb0, the dongle is autodetected and the focuser is blocked. if i disconnect the dongle, it works
- if i run pegasus falccon rotator and my DS2600 in parallel, the touptek is recognized but i cannot retreive images.
is there a possible explanation for this,or have you experienced something similar?
yours wolfi
Read More...
ok, seems to be an ubuntu problem. lx200 works with windows and astroberry ... any idea out there?
yours wolfi
Read More...
Hello!
I tried to track down the problem - the crash is on KStars, the indiserver carries on. the last packet i see from kstars being sent to the indiserver is
<setNumberVector device="LX200 Basic" name="EQUATORIAL_EOD_COORD" state="Idle" timeout="60" timestamp="2022-06-28T19:36:27">
<oneNumber name="RA">
15.10083333333333222
</oneNumber>
<oneNumber name="DEC">
-41.799999999999997158
</oneNumber>
</setNumberVector>
the a segfault happens to kstars. a subsequent boot of kstars shows that LX200 is connected and all is fine ...
does anyone have an ide what is going on here?
yours wolfi
Read More...
hi!
i have here controller that can either start an INDI server of it's own, or can be accessed with INDI via TCP/IP or serial.
whenever I connect the LX200 Basic client to my mount controller, KStars crashes with a massive segfault, but the INDI server survives. when startting KStars again, I can connect to the running INDI server and all is fine. Other INDI clients like stellarium do not show this behaviour.
could that be a bug in LX200 Basic???
here is my log ...
[2022-06-19T23:33:15.005 CEST INFO ][ org.kde.kstars] - Welcome to KStars 3.5.9 Stable
[2022-06-19T23:33:15.005 CEST INFO ][ org.kde.kstars] - Build: 2022-06-13T06:24:46Z
[2022-06-19T23:33:15.005 CEST INFO ][ org.kde.kstars] - OS: "ubuntu"
[2022-06-19T23:33:15.005 CEST INFO ][ org.kde.kstars] - API: "x86_64-little_endian-lp64"
[2022-06-19T23:33:15.005 CEST INFO ][ org.kde.kstars] - Arch: "x86_64"
[2022-06-19T23:33:15.005 CEST INFO ][ org.kde.kstars] - Kernel Type: "linux"
[2022-06-19T23:33:15.005 CEST INFO ][ org.kde.kstars] - Kernel Version: "5.13.0-51-generic"
[2022-06-19T23:33:15.005 CEST INFO ][ org.kde.kstars] - Qt Version: 5.15.2
[2022-06-19T23:33:15.114 CEST DEBG ][ org.kde.kstars] - Opened the User DB. Ready.
[2022-06-19T23:33:15.198 CEST INFO ][ org.kde.kstars] - Processing "unnamedstars.dat" , HTMesh Level 3
[2022-06-19T23:33:15.198 CEST INFO ][ org.kde.kstars] - Sky Mesh Size: 512
[2022-06-19T23:33:15.217 CEST INFO ][ org.kde.kstars] - Loaded DSO catalog file: "unnamedstars.dat"
[2022-06-19T23:33:15.339 CEST WARN ][ org.kde.kstars] - "Star HD20 794 not found."
[2022-06-19T23:33:15.345 CEST WARN ][ org.kde.kstars] - "Star HD98 230 not found."
[2022-06-19T23:33:15.350 CEST INFO ][ org.kde.kstars] - Loaded DSO catalogs.
[2022-06-19T23:33:15.401 CEST INFO ][ org.kde.kstars] - Loading comets
[2022-06-19T23:33:15.455 CEST DEBG ][ org.kde.kstars] - Paths to color scheme : ("/usr/share/kstars/themes")
[2022-06-19T23:33:15.495 CEST DEBG ][ org.kde.kstars] - Reporting new timestep value: 60
[2022-06-19T23:33:15.563 CEST WARN ][ default] - libpng warning: iCCP: known incorrect sRGB profile
[2022-06-19T23:33:15.602 CEST CRIT ][ kf.xmlgui] - Shortcut for action "get_data" "Download New Data..." set with QAction::setShortcut()! Use KActionCollection::setDefaultShortcut(s) instead.
[2022-06-19T23:33:15.602 CEST CRIT ][ kf.xmlgui] - Shortcut for action "timestep_increase_units" "Increase Time Scale" set with QAction::setShortcut()! Use KActionCollection::setDefaultShortcut(s) instead.
[2022-06-19T23:33:15.602 CEST CRIT ][ kf.xmlgui] - Shortcut for action "timestep_decrease_units" "Decrease Time Scale" set with QAction::setShortcut()! Use KActionCollection::setDefaultShortcut(s) instead.
[2022-06-19T23:33:15.734 CEST DEBG ][ org.kde.kstars] - Starting the timer
[2022-06-19T23:33:15.782 CEST DEBG ][ org.kde.kstars] - Date/Time is: "So. Juni 19 21:33:15 2022 GMT"
[2022-06-19T23:33:15.782 CEST DEBG ][ org.kde.kstars] - Location: "Vienna, Austria"
[2022-06-19T23:33:15.782 CEST DEBG ][ org.kde.kstars] - TZ0: 1 TZ: 1
[2022-06-19T23:33:15.783 CEST WARN ][ org.kde.kstars] - Current icon theme is "Yaru"
[2022-06-19T23:33:15.797 CEST DEBG ][ org.kde.kstars] - "Default" :: ""
[2022-06-19T23:33:15.870 CEST DEBG ][ default] - glibc >= 2.1 detected. Using GNU extension sincos()
[2022-06-19T23:33:15.878 CEST DEBG ][ default] - static bool LibSecretKeyring::findPassword(const QString&, const QString&, QKeychain::JobPrivate*)
[2022-06-19T23:33:16.043 CEST WARN ][ default] - QImage::scaled: Image is a null image
[2022-06-19T23:33:16.684 CEST INFO ][ org.kde.kstars] - Loading comets
[2022-06-19T23:33:21.720 CEST WARN ][ default] - edit: editing failed
[2022-06-19T23:33:22.864 CEST WARN ][ default] - edit: editing failed
[2022-06-19T23:33:25.862 CEST INFO ][ org.kde.kstars.indi] - LX200 Basic : "[INFO] Connecting to 192.168.50.5@49152 ... "
[2022-06-19T23:33:25.978 CEST INFO ][ org.kde.kstars.indi] - LX200 Basic : "[INFO] LX200 Basic is online. "
yours wolfi
Read More...
hi!
ok, i am a little bit further - the camera reacts to ST4 commands, but when i send a pulse via INDI, it keeps repeating that one 
yours wolfi
Read More...
hi!
i have an issue with touptek cameras here - i cannot make ST4 guiding commands work. does someone have this up and running? if so - what is your cable pinour???
yours wolfi
Read More...