Seletek Rotator
Installation
The Lunatico's Seletek Rotator driver as a 3rd party driver with INDI >= 1.8.6 Under Ubuntu, you can install the driver via:
sudo add-apt-repository ppa:mutlaqja/ppa
sudo apt-get update
sudo apt-get install indi-armadillo-platypus
Features
The Seletek Aramadillo and Playtubus controllers support control for focuser, rotator, and filter wheels. Therefore, any stepper motor can be configured to act as a rotator. There is no primary difference between a focuser and a rotator when using the Seletek controller board, the difference is in the function it serves. For rotators, you are limited by a travel distance from +180 to -180 degrees. Zero degrees is defined as when the camera is pointing UP and completely level.
Connection
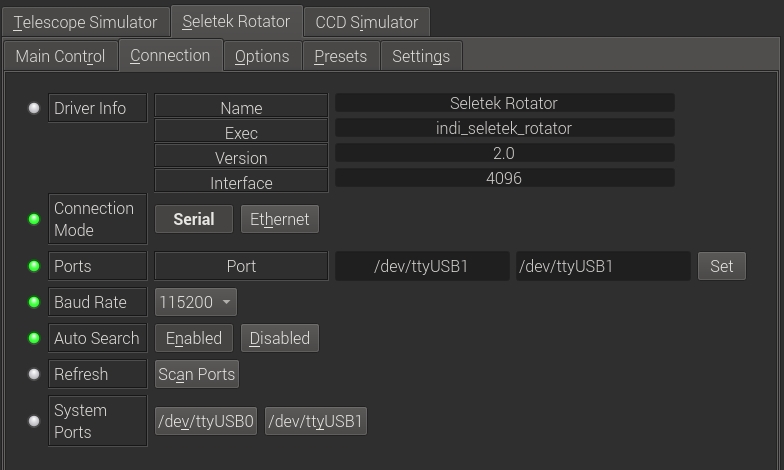
Before connecting, specify the connection port (default /dev/ttyUSB0). You can select from the detected serial ports next to System Ports property. If you are using a network-enabled controller, click the Ethernet button and set the IP address and port accordingly. Finally, in the Main Control tab, set which controller port the rotator is connected to (Main, Exp, or Third).
Main Control
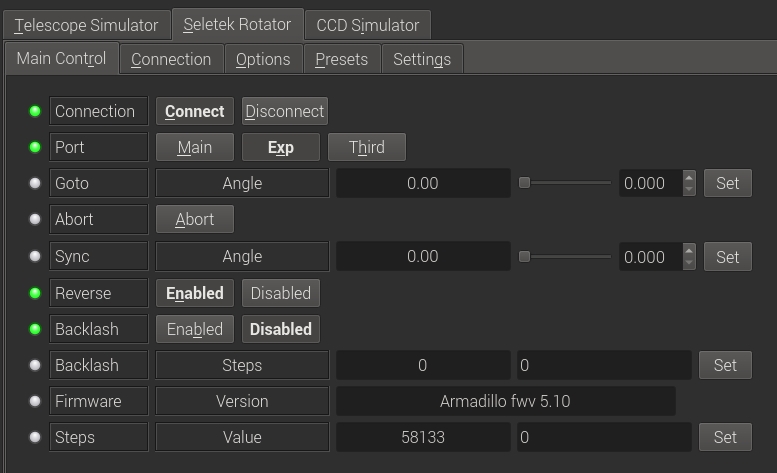
Once connected the current rotator steps and firmware are detected. Upon connecting for the first time, you must first configure the Settings before commanding any motion.
You can control the rotator by setting the Angle in the Goto property or by directly specifying the steps in the Steps property at the bottom. Use Sync to synchronize the current position angle to the desired value. This does not move the rotator, it only sets its current angle.
The motion direction can be Reversed if desired, and the backlash compensation can be enabled after setting the desired backlash value in steps.
Presets
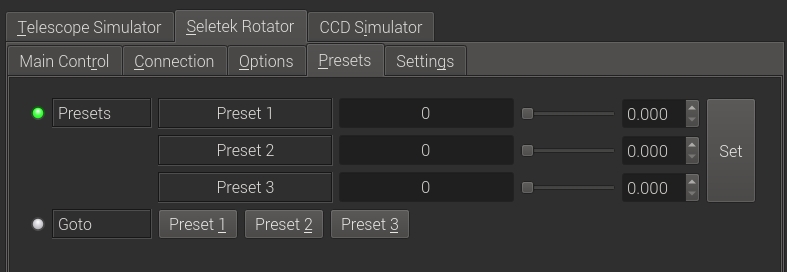
You may set up to 3 preset positions. When you make a change, the new values will be saved in the driver's configuration file and are loaded automatically in subsequent uses.
Settings
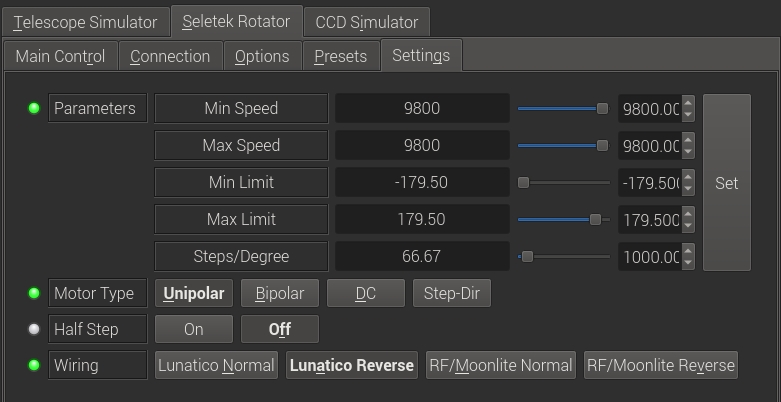
Configure the motion parameters and motor type in settings:
- Speed: Set the minimum and maximum speeds in usec/step.
- Limits: Set the minimum and maximum permitted rotation angle. By default, the rotator can rotate CCW to -179.5 degrees and the same for +179.5. Rotator will always take the shortest distance to the target but it would not cross over the limit. For example, if the rotator is a 170 degrees, and the next target was -170, then it would travel CCW 340 degrees until it rearched the target angle.
- Steps/Degree: How many steps in one degree. Without this setting, angle control will not work.
- Motor Type: Must select the correct motor type (Unipolar, Bipolar, DC, Step-Dir)
- Half Step: Toggle on/off
- Wiring: Select how the rotator is connected to the board.
Warning! All the settings must be correctly set before command any motor motion. Neglecting the settings may lead to permenant damage to the motor and/or controller.
Issues
There are no known bugs for this driver. If you found a bug, please report it at INDI's bug tracking system at SourceForge. (You can log in with a variety of existing accounts, including Google, Yahoo and OpenID.)


{kind=link}