INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Cannot play back SER videos?
- Jasem Mutlaq
-

- Online
- Administrator
-

Replied by Jasem Mutlaq on topic Cannot play back SER videos?
Please Log in or Create an account to join the conversation.

Replied by Stefan R. on topic Cannot play back SER videos?
My camera is a ToupTek GP-1200-KMB Mono and I was recording in full resolution (1280x960).
IAccording to the manual my camera supports a bit depth of 12.
In the INDI Control Panel inside KStars I selected the camera and on the Image Info tab in it says "Bits per pixel: 16".
And on the Controls tab I can see that "Mono 16" is selected. The only other option is "Mono 8".
I wonder if this is the issue for me? Camera supports only 12 bits but INDI is configured for 16?
However, the live view looked good and recording went fine.
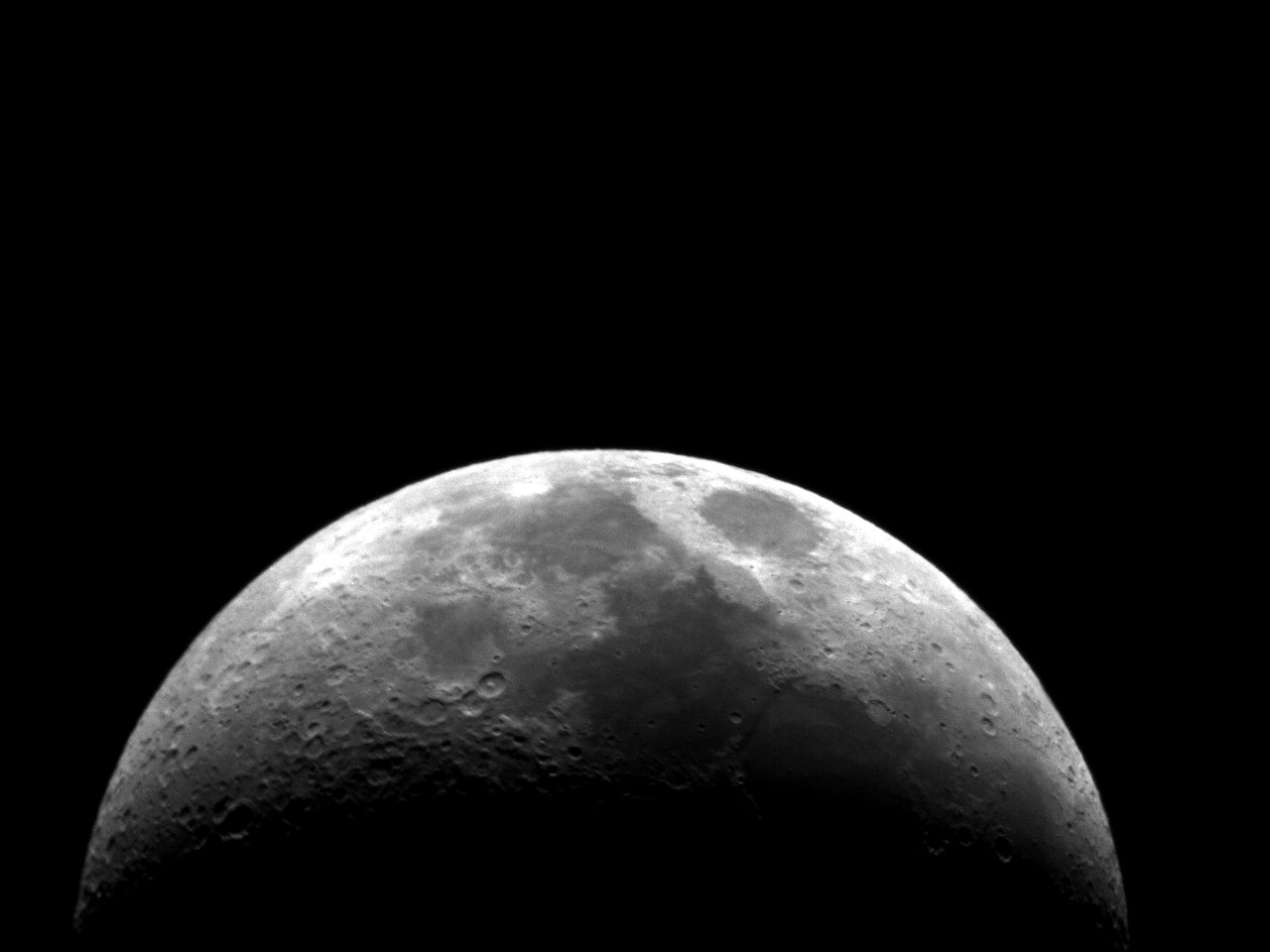
I also captured some normal frames that looks fine (see attached image).
But the movies I recorded with the live view (ser format) looks very weird when i see them in AutoStakkert and I am not even able to open them in PIPP.
The moon appears twice on the videos and it does not look at all like the single frames.
The 2 moons looks like they are made of white and black noise.
If I reduce the SER scaling in Autostakkert to 8 bit there are still 2 moons and each of them looks a bit like the single frames I captured (but much darker).
If I turn up the brightness to 8x the 2 moons starts looking much more like the single frames, but it is obvious that the greyscale quality is much worse.
PIPP shows me this header details for one of the ser files:
Header Details:
* FileID: LUCAM-RECORDER
* LuID: 0x0
* ColorID: 0 (MONO)
* LittleEndian: 1
* ImageWidth: 1280
* ImageHeight: 960
* PixelDepth: 16
* FrameCount: 753
* Observer: Unknown Observer
* Instrument: Unknown Instrument
* Telescope: Unknown Telescope
* DateTime: 01/03/0120 22:38:38.422057 (0x008599438581519a)
* DateTime_UTC: 30/03/2020 20:38:38.422113 (0x08d7d4ea537b03ca)
Error: Filesize is too short to hold all the frames
is there any way I can fix the videofiles so I can stack them?
Please Log in or Create an account to join the conversation.
Replied by Stefan R. on topic Cannot play back SER videos?
So I will do that going forward. But I still hope to save the videos I took during the weekend if anyone has a tip I will be very happy.
BTW, I can also confirm that trying to record cropped videos from the Live view results in useless video files no matter if "Mono 8" or "Mono 16" are selected.
EDIT: I used a hex editor to change the bit depth in the SER file header from 16 bit to 8 bit. It made it possible to open and watch the files but the video stream was corrupted and the images could not be used for stacking. So I have to delete the files and capture new ones with "Mono 8" next time I have clear skies.
Please Log in or Create an account to join the conversation.
Replied by Stefan R. on topic Cannot play back SER videos?
However, the SER header gets the correct information about bit depth (Based on INDI settings) and resolution (Based on live view frame size).
If anyone can point me to the place in the code where video files are written to disk I can try to take a look at it.
I am a developer by profession and have some C++ experience from years back, but I have no experience with the KStars/Ekos code or INDI.
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic Cannot play back SER videos?
Right now, it's downscaling to 8bit. Though I can see that one improvement could be to immediately record the data before performing the downscaling. At any rate, I'm open to ideas for improvement. A few weeks ago I had to disable the threading for asyncStream when recording is active as I couldn't trace back a thread issue with file descriptors. Right now it's running on the main thread so it's slower but works OK. If you can also investigate this part it would be great!
Please Log in or Create an account to join the conversation.
Replied by Stefan R. on topic Cannot play back SER videos?
I guess that it is possible to make the local KStars project use the local INDI project so I can debug it and try out my code changes.
And I guess that you already have that set up so any suggestions would be great before I try to make it work on my own.
I am using Debian for the task.
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic Cannot play back SER videos?
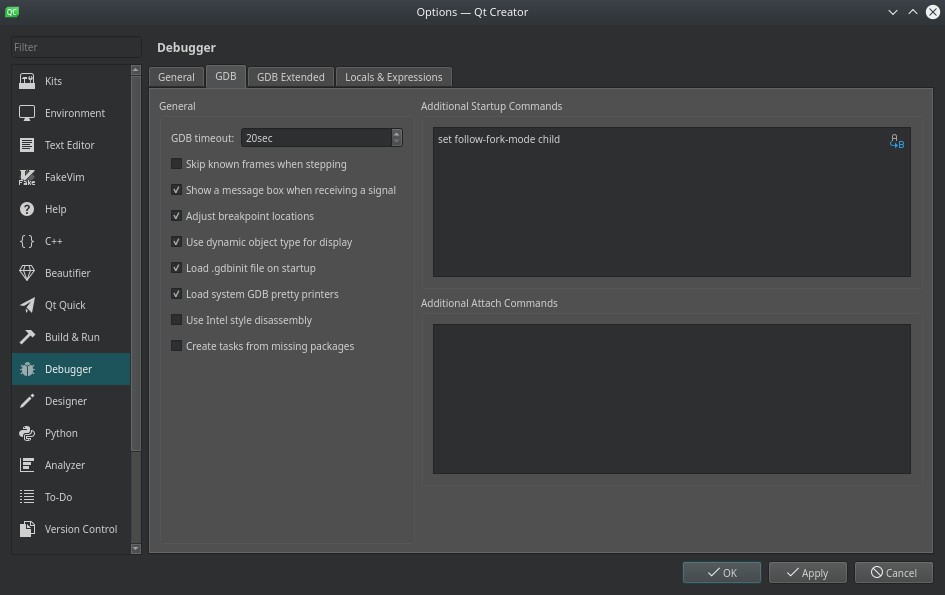
Basically, in Ekos, you select "remote" but keep the host as localhost. You can then start INDI driver on command line, or preferably in QtCreator so you can debug easily as shown above.
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic Cannot play back SER videos?
Please Log in or Create an account to join the conversation.
Replied by Stefan R. on topic Cannot play back SER videos?
But my development setup is ready (following the link you sent) and Ihave verified that I am able to debug the local indi code by connecting in Ekos as you described above.
Everything is working, now I just need some time to debug and see what I can discover
")
Yesterday, I read through the INDI developer manual to get a better understanding before I start debugging.
Please Log in or Create an account to join the conversation.
Replied by Stefan R. on topic Cannot play back SER videos?
My breakpoints in this file are activated and stops the debugger:
/indi/indiserver.c
But unfortunately my breakpoints in this file are not activated and does not stop the debugger:
/indi/libs/stream/streammanager.cpp
Do I need to attach the debugger to another process in order to catch the breakpoints in this file?
---
Here is what I did:
Build Configuration set to Debug in Qt Creator.
Run settings set to indiserver with these parameters:
-v indi_simulator_ccd indi_simulator_telescope
Selected Debug -> indiserver in the lower left of Qt creator.
Clicked Start Debugging button.
indiserver starts up and I am able to connect to it using KStars.
Breakpoints in the indiserver code is activated but not breakpoints in any other "module".
I also tried selecting Debug -> indi_simulator_ccd
Before I started debugging and this activated breakpoints in the indi_simulator_ccd code but now the indiserver is not running.
I then tried to debus indi_simulator_ccd and start the indiserver on the side.
But here it does not look like any breakpoints are activated at all
Any tips on how to debug different parts of indi in Qt Creator would be nice.
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic Cannot play back SER videos?
You can also start it as:
-v ./indi_simulator_ccd indi_simulator_telescopeThen whenever you make changes to the CCD simulator, you can simply compile and run again without running sudo make install. Please note that when you stop the debugger, it does not kill indiserver. So if you want to truly restart the indiserver, you must type in a terminal pkill indiserver before clicking debug again.
Please Log in or Create an account to join the conversation.
Replied by Stefan R. on topic Cannot play back SER videos?
Now my breakpoints are activated in all different parts of the code.
However, as soon as I start "Live Video" in the CCD module of Ekos in Kstars with CCD Simulator, the debugger exits without stopping anywhere.
In Tools -> Options -> GDB Extended I have checked "Stop when qFatal() is called" and "Stop when abort() is called" but apparently none of those are called when it stops.
Below in the spoiler you can find the content of the Debugger log at that time.
Kstars/Ekos continues behaving normally after the debugger stops.
The CCD Simulator continues showing live view as if nothing happened.
Have you experienced this issue with sudden debugger exit before?
2020-04-07T20:46:15: Driver ./indi_simulator_ccd: -->GSC Command: gsc -c 359.871833 +89.887169 -r 16.3 -m 0 17.00 -n 3000
>=thread-group-added,id="i3"
>=thread-group-started,id="i3",pid="5770"
sThread group i3 created.
dTaking notice of pid 5770
>=thread-exited,id="2",group-id="i2"
sThread 2 in group i2 exited.
>=thread-exited,id="3",group-id="i2"
sThread 3 in group i2 exited.
>=thread-group-exited,id="i2"
sThread group i2 exited.
>=thread-created,id="4",group-id="i3"
sThread 4 created.
>~"[New process 5770]\n"
s[New process 5770]
>~"[Thread debugging using libthread_db enabled]\n"
s[Thread debugging using libthread_db enabled]
>~"Using host libthread_db library \"/lib/x86_64-linux-gnu/libthread_db.so.1\".\n"
>*running,thread-id="4"
dNOTE: INFERIOR STILL RUNNING IN STATE InferiorRunOk.
>~"process 5770 is executing new program: /bin/dash\n"
>=library-unloaded,id="/lib64/ld-linux-x86-64.so.2",target-name="/lib64/ld-linux-x86-64.so.2",host-name="/lib64/ld-linux-x86-64.so.2",thread-group="i3"
sLibrary /lib64/ld-linux-x86-64.so.2 unloaded.
>=library-unloaded,id="/home/stefan/Projects/build-indi-Desktop-Debug/libindidriver.so.1",target-name="/home/stefan/Projects/build-indi-Desktop-Debug/libindidriver.so.1",host-name="/home/stefan/Projects/build-indi-Desktop-Debug/libindidriver.so.1",thread-group="i3"
sLibrary /home/stefan/Projects/build-indi-Desktop-Debug/libindidriver.so.1 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libnova-0.16.so.0",target-name="/usr/lib/x86_64-linux-gnu/libnova-0.16.so.0",host-name="/usr/lib/x86_64-linux-gnu/libnova-0.16.so.0",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libnova-0.16.so.0 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libpthread.so.0",target-name="/lib/x86_64-linux-gnu/libpthread.so.0",host-name="/lib/x86_64-linux-gnu/libpthread.so.0",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libpthread.so.0 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libcfitsio.so.5",target-name="/usr/lib/x86_64-linux-gnu/libcfitsio.so.5",host-name="/usr/lib/x86_64-linux-gnu/libcfitsio.so.5",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libcfitsio.so.5 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libstdc++.so.6",target-name="/usr/lib/x86_64-linux-gnu/libstdc++.so.6",host-name="/usr/lib/x86_64-linux-gnu/libstdc++.so.6",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libstdc++.so.6 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libm.so.6",target-name="/lib/x86_64-linux-gnu/libm.so.6",host-name="/lib/x86_64-linux-gnu/libm.so.6",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libm.so.6 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libgcc_s.so.1",target-name="/lib/x86_64-linux-gnu/libgcc_s.so.1",host-name="/lib/x86_64-linux-gnu/libgcc_s.so.1",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libgcc_s.so.1 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libc.so.6",target-name="/lib/x86_64-linux-gnu/libc.so.6",host-name="/lib/x86_64-linux-gnu/libc.so.6",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libc.so.6 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libusb-1.0.so.0",target-name="/lib/x86_64-linux-gnu/libusb-1.0.so.0",host-name="/lib/x86_64-linux-gnu/libusb-1.0.so.0",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libusb-1.0.so.0 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libz.so.1",target-name="/lib/x86_64-linux-gnu/libz.so.1",host-name="/lib/x86_64-linux-gnu/libz.so.1",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libz.so.1 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libjpeg.so.8",target-name="/usr/lib/x86_64-linux-gnu/libjpeg.so.8",host-name="/usr/lib/x86_64-linux-gnu/libjpeg.so.8",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libjpeg.so.8 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libfftw3.so.3",target-name="/usr/lib/x86_64-linux-gnu/libfftw3.so.3",host-name="/usr/lib/x86_64-linux-gnu/libfftw3.so.3",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libfftw3.so.3 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libbz2.so.1.0",target-name="/lib/x86_64-linux-gnu/libbz2.so.1.0",host-name="/lib/x86_64-linux-gnu/libbz2.so.1.0",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libbz2.so.1.0 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libcurl-gnutls.so.4",target-name="/usr/lib/x86_64-linux-gnu/libcurl-gnutls.so.4",host-name="/usr/lib/x86_64-linux-gnu/libcurl-gnutls.so.4",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libcurl-gnutls.so.4 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libudev.so.1",target-name="/lib/x86_64-linux-gnu/libudev.so.1",host-name="/lib/x86_64-linux-gnu/libudev.so.1",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libudev.so.1 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libnghttp2.so.14",target-name="/usr/lib/x86_64-linux-gnu/libnghttp2.so.14",host-name="/usr/lib/x86_64-linux-gnu/libnghttp2.so.14",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libnghttp2.so.14 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libidn2.so.0",target-name="/usr/lib/x86_64-linux-gnu/libidn2.so.0",host-name="/usr/lib/x86_64-linux-gnu/libidn2.so.0",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libidn2.so.0 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/librtmp.so.1",target-name="/usr/lib/x86_64-linux-gnu/librtmp.so.1",host-name="/usr/lib/x86_64-linux-gnu/librtmp.so.1",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/librtmp.so.1 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libpsl.so.5",target-name="/usr/lib/x86_64-linux-gnu/libpsl.so.5",host-name="/usr/lib/x86_64-linux-gnu/libpsl.so.5",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libpsl.so.5 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libnettle.so.6",target-name="/usr/lib/x86_64-linux-gnu/libnettle.so.6",host-name="/usr/lib/x86_64-linux-gnu/libnettle.so.6",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libnettle.so.6 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libgnutls.so.30",target-name="/usr/lib/x86_64-linux-gnu/libgnutls.so.30",host-name="/usr/lib/x86_64-linux-gnu/libgnutls.so.30",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libgnutls.so.30 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libgssapi_krb5.so.2",target-name="/usr/lib/x86_64-linux-gnu/libgssapi_krb5.so.2",host-name="/usr/lib/x86_64-linux-gnu/libgssapi_krb5.so.2",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libgssapi_krb5.so.2 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libldap_r-2.4.so.2",target-name="/usr/lib/x86_64-linux-gnu/libldap_r-2.4.so.2",host-name="/usr/lib/x86_64-linux-gnu/libldap_r-2.4.so.2",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libldap_r-2.4.so.2 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/liblber-2.4.so.2",target-name="/usr/lib/x86_64-linux-gnu/liblber-2.4.so.2",host-name="/usr/lib/x86_64-linux-gnu/liblber-2.4.so.2",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/liblber-2.4.so.2 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/librt.so.1",target-name="/lib/x86_64-linux-gnu/librt.so.1",host-name="/lib/x86_64-linux-gnu/librt.so.1",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/librt.so.1 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libunistring.so.2",target-name="/usr/lib/x86_64-linux-gnu/libunistring.so.2",host-name="/usr/lib/x86_64-linux-gnu/libunistring.so.2",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libunistring.so.2 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libhogweed.so.4",target-name="/usr/lib/x86_64-linux-gnu/libhogweed.so.4",host-name="/usr/lib/x86_64-linux-gnu/libhogweed.so.4",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libhogweed.so.4 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libgmp.so.10",target-name="/usr/lib/x86_64-linux-gnu/libgmp.so.10",host-name="/usr/lib/x86_64-linux-gnu/libgmp.so.10",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libgmp.so.10 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libp11-kit.so.0",target-name="/usr/lib/x86_64-linux-gnu/libp11-kit.so.0",host-name="/usr/lib/x86_64-linux-gnu/libp11-kit.so.0",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libp11-kit.so.0 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libtasn1.so.6",target-name="/usr/lib/x86_64-linux-gnu/libtasn1.so.6",host-name="/usr/lib/x86_64-linux-gnu/libtasn1.so.6",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libtasn1.so.6 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libkrb5.so.3",target-name="/usr/lib/x86_64-linux-gnu/libkrb5.so.3",host-name="/usr/lib/x86_64-linux-gnu/libkrb5.so.3",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libkrb5.so.3 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libk5crypto.so.3",target-name="/usr/lib/x86_64-linux-gnu/libk5crypto.so.3",host-name="/usr/lib/x86_64-linux-gnu/libk5crypto.so.3",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libk5crypto.so.3 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libcom_err.so.2",target-name="/lib/x86_64-linux-gnu/libcom_err.so.2",host-name="/lib/x86_64-linux-gnu/libcom_err.so.2",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libcom_err.so.2 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libkrb5support.so.0",target-name="/usr/lib/x86_64-linux-gnu/libkrb5support.so.0",host-name="/usr/lib/x86_64-linux-gnu/libkrb5support.so.0",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libkrb5support.so.0 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libresolv.so.2",target-name="/lib/x86_64-linux-gnu/libresolv.so.2",host-name="/lib/x86_64-linux-gnu/libresolv.so.2",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libresolv.so.2 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libsasl2.so.2",target-name="/usr/lib/x86_64-linux-gnu/libsasl2.so.2",host-name="/usr/lib/x86_64-linux-gnu/libsasl2.so.2",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libsasl2.so.2 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libgssapi.so.3",target-name="/usr/lib/x86_64-linux-gnu/libgssapi.so.3",host-name="/usr/lib/x86_64-linux-gnu/libgssapi.so.3",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libgssapi.so.3 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libffi.so.6",target-name="/usr/lib/x86_64-linux-gnu/libffi.so.6",host-name="/usr/lib/x86_64-linux-gnu/libffi.so.6",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libffi.so.6 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libdl.so.2",target-name="/lib/x86_64-linux-gnu/libdl.so.2",host-name="/lib/x86_64-linux-gnu/libdl.so.2",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libdl.so.2 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libkeyutils.so.1",target-name="/lib/x86_64-linux-gnu/libkeyutils.so.1",host-name="/lib/x86_64-linux-gnu/libkeyutils.so.1",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libkeyutils.so.1 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libheimntlm.so.0",target-name="/usr/lib/x86_64-linux-gnu/libheimntlm.so.0",host-name="/usr/lib/x86_64-linux-gnu/libheimntlm.so.0",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libheimntlm.so.0 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libkrb5.so.26",target-name="/usr/lib/x86_64-linux-gnu/libkrb5.so.26",host-name="/usr/lib/x86_64-linux-gnu/libkrb5.so.26",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libkrb5.so.26 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libasn1.so.8",target-name="/usr/lib/x86_64-linux-gnu/libasn1.so.8",host-name="/usr/lib/x86_64-linux-gnu/libasn1.so.8",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libasn1.so.8 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libhcrypto.so.4",target-name="/usr/lib/x86_64-linux-gnu/libhcrypto.so.4",host-name="/usr/lib/x86_64-linux-gnu/libhcrypto.so.4",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libhcrypto.so.4 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libroken.so.18",target-name="/usr/lib/x86_64-linux-gnu/libroken.so.18",host-name="/usr/lib/x86_64-linux-gnu/libroken.so.18",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libroken.so.18 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libwind.so.0",target-name="/usr/lib/x86_64-linux-gnu/libwind.so.0",host-name="/usr/lib/x86_64-linux-gnu/libwind.so.0",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libwind.so.0 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libheimbase.so.1",target-name="/usr/lib/x86_64-linux-gnu/libheimbase.so.1",host-name="/usr/lib/x86_64-linux-gnu/libheimbase.so.1",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libheimbase.so.1 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libhx509.so.5",target-name="/usr/lib/x86_64-linux-gnu/libhx509.so.5",host-name="/usr/lib/x86_64-linux-gnu/libhx509.so.5",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libhx509.so.5 unloaded.
>=library-unloaded,id="/usr/lib/x86_64-linux-gnu/libsqlite3.so.0",target-name="/usr/lib/x86_64-linux-gnu/libsqlite3.so.0",host-name="/usr/lib/x86_64-linux-gnu/libsqlite3.so.0",thread-group="i3"
sLibrary /usr/lib/x86_64-linux-gnu/libsqlite3.so.0 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libcrypt.so.1",target-name="/lib/x86_64-linux-gnu/libcrypt.so.1",host-name="/lib/x86_64-linux-gnu/libcrypt.so.1",thread-group="i3"
sLibrary /lib/x86_64-linux-gnu/libcrypt.so.1 unloaded.
>=library-loaded,id="/lib64/ld-linux-x86-64.so.2",target-name="/lib64/ld-linux-x86-64.so.2",host-name="/lib64/ld-linux-x86-64.so.2",symbols-loaded="0",thread-group="i3",ranges=[{from="0x00007ffff7dd5f10",to="0x00007ffff7df4b20"}]
sLibrary /lib64/ld-linux-x86-64.so.2 loaded.
>=library-loaded,id="/lib/x86_64-linux-gnu/libc.so.6",target-name="/lib/x86_64-linux-gnu/libc.so.6",host-name="/lib/x86_64-linux-gnu/libc.so.6",symbols-loaded="0",thread-group="i3",ranges=[{from="0x00007ffff7a052d0",to="0x00007ffff7b7dc3c"}]
sLibrary /lib/x86_64-linux-gnu/libc.so.6 loaded.
>=thread-group-added,id="i4"
>=thread-group-started,id="i4",pid="5771"
sThread group i4 created.
dTaking notice of pid 5771
>=thread-exited,id="4",group-id="i3"
sThread 4 in group i3 exited.
>=thread-group-exited,id="i3"
sThread group i3 exited.
>=thread-created,id="5",group-id="i4"
sThread 5 created.
>~"[New process 5771]\n"
s[New process 5771]
>*running,thread-id="5"
dNOTE: INFERIOR STILL RUNNING IN STATE InferiorRunOk.
>~"process 5771 is executing new program: /usr/bin/gsc\n"
>=library-unloaded,id="/lib64/ld-linux-x86-64.so.2",target-name="/lib64/ld-linux-x86-64.so.2",host-name="/lib64/ld-linux-x86-64.so.2",thread-group="i4"
sLibrary /lib64/ld-linux-x86-64.so.2 unloaded.
>=library-unloaded,id="/lib/x86_64-linux-gnu/libc.so.6",target-name="/lib/x86_64-linux-gnu/libc.so.6",host-name="/lib/x86_64-linux-gnu/libc.so.6",thread-group="i4"
sLibrary /lib/x86_64-linux-gnu/libc.so.6 unloaded.
>=library-loaded,id="/lib64/ld-linux-x86-64.so.2",target-name="/lib64/ld-linux-x86-64.so.2",host-name="/lib64/ld-linux-x86-64.so.2",symbols-loaded="0",thread-group="i4",ranges=[{from="0x00007ffff7dd5f10",to="0x00007ffff7df4b20"}]
sLibrary /lib64/ld-linux-x86-64.so.2 loaded.
>=library-loaded,id="/lib/x86_64-linux-gnu/libm.so.6",target-name="/lib/x86_64-linux-gnu/libm.so.6",host-name="/lib/x86_64-linux-gnu/libm.so.6",symbols-loaded="0",thread-group="i4",ranges=[{from="0x00007ffff7a42a80",to="0x00007ffff7b012f5"}]
sLibrary /lib/x86_64-linux-gnu/libm.so.6 loaded.
>=library-loaded,id="/lib/x86_64-linux-gnu/libc.so.6",target-name="/lib/x86_64-linux-gnu/libc.so.6",host-name="/lib/x86_64-linux-gnu/libc.so.6",symbols-loaded="0",thread-group="i4",ranges=[{from="0x00007ffff76672d0",to="0x00007ffff77dfc3c"}]
sLibrary /lib/x86_64-linux-gnu/libc.so.6 loaded.
>~"[Inferior 4 (process 5771) exited normally]\n"
>=thread-exited,id="5",group-id="i4"
sThread 5 in group i4 exited.
>=thread-group-exited,id="i4",exit-code="0"
sThread group i4 exited.
dNOTE: INFERIOR EXITED
dState changed from InferiorRunOk(11) to InferiorShutdownOk(18) [master]
dState changed from InferiorShutdownOk(18) to EngineShutdownRequested(19) [master]
dCALL: SHUTDOWN ENGINE
dPLAIN ADAPTER SHUTDOWN 19
dINITIATE GDBENGINE SHUTDOWN, PROC STATE: 2
<415python theDumper.exitGdb({"token":415})
>*stopped,reason="exited-normally"
dNOTE: INFERIOR STOP OK
dNOTE: ... WHILE DYING.
dNOTE: ... IGNORING STOP MESSAGE
>&"p 0\n"
>~"$2 = 0"
>~"\n"
>^done
>&"python theDumper.exitGdb({\"token\":415})\n"
dGDB PROCESS FINISHED, status 0, exit code 0
dNOTE: ENGINE SHUTDOWN OK
dState changed from EngineShutdownRequested(19) to EngineShutdownOk(21) [master]
dState changed from EngineShutdownOk(21) to DebuggerFinished(22) [master]
sDebugger finished.
</code>
I decided to try with my real ToupCam device connected (and the indi_toupcam_ccd driver started) and here the debugger does not exit, so now I am able to debug what happens while streaming.
I will take a closer look at that one of the next days.
Please Log in or Create an account to join the conversation.