Hi,
I own several Dobsonian telescopes and I decided that I want to implement a GOTO system for them in Python. I have ordered the hardware parts (SBC, stepper motors, simple encoders etc) that will perform the actual movement of the telescope. However, it will also need code to allow INDI to control the telescope. I started looking into implementing the SkyWatcher protocol but that proved to be hopelessly complicated what with swapping bytes and the complete and utter lack of documentation as to what the replies to the commands received should be, so I gave up on that and switched to the LX200 protocol which seems much better documented.
By now I am able to connect Ekos to my "telescope" via a TCP socket, receive initialization commands from Ekos and send replies. It took me a bit of figuring out what Ekos (or the LX200 protocol for that matter) expects since again the replies are not documented very well. But in a few days I have come so far that I can inform Ekos that I have an AltAz telescope that's pointing at the south celestial pole and provide site information.
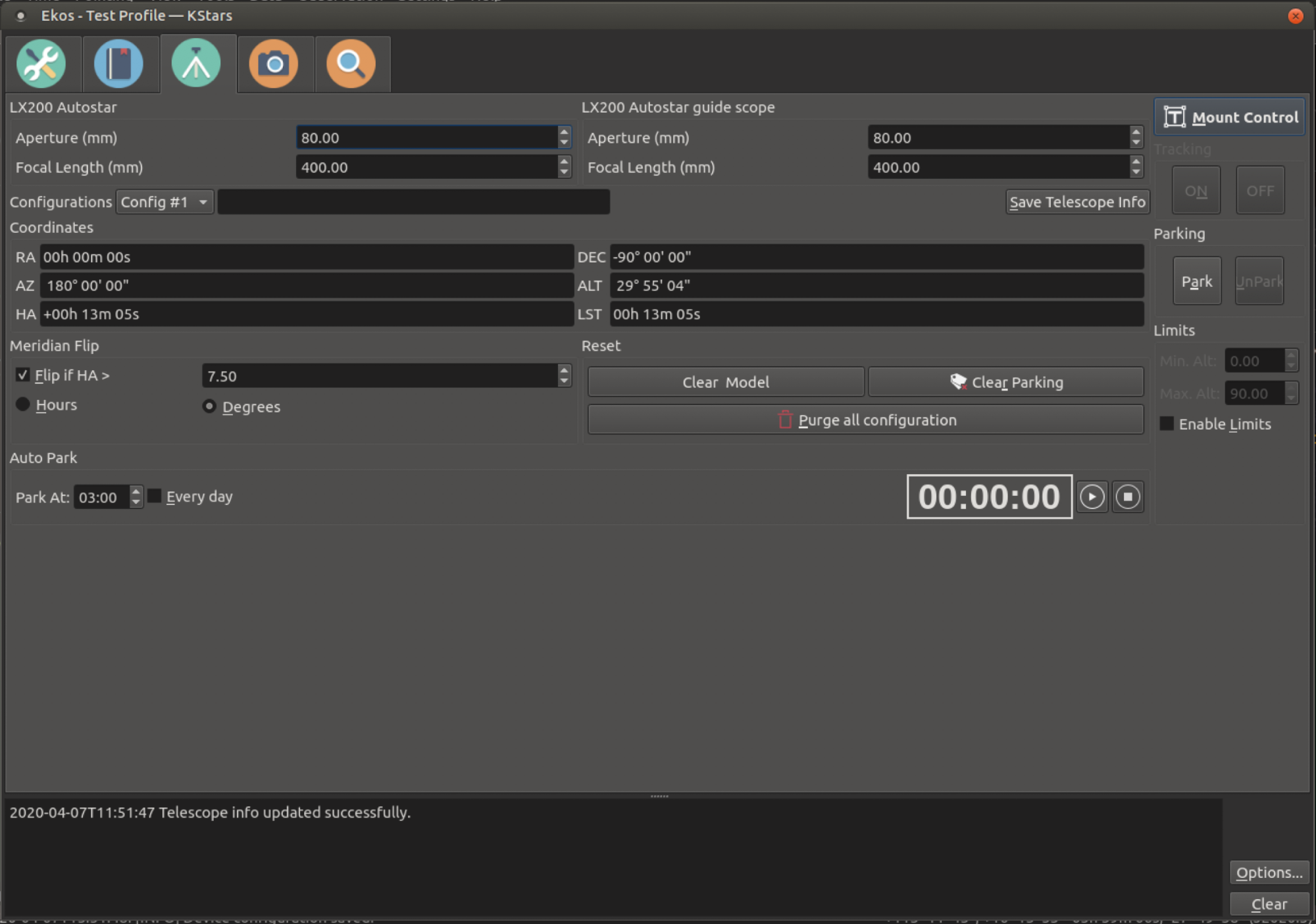
So next I will look into actually "slewing" the telescope, which means a virtual slew for now until I have actually programmed the SBC and motors to respond. However, before I can do so I thin k I am running into an issue. When, after connecting the "telescope" to Ekos, I go to the Mount tab, I see that all buttons regarding tracking are disabled. At first I thought that this may be due to the fact that I inform Ekos that my telescope is AltAz, but when I tell it that it is a Polar telescope the controls are disabled as well. Here is a screenshot of what I mean:
I have also attached the log files from Ekos. As you can see, all commands are received OK by my "telescope" and the replies are received OK by Ekos. Can anyone enlighten me to what I am missing?
Thanks, Wouter
Here are the logs:


")