INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Difficulties using new autoguiding parameters

Difficulties using new autoguiding parameters was created by Patrick
I use a CEM60 mount and a ASI120 connected to a 60x300 guiding telescope.
With previous versions of EKOS/INDI I had a global RMS around 0.30 arcsec max and a RMS on each axes around 0,2 arcsec and sometimes around 0,10 arcsec.
The curves where very soft.
Now with the new autoguiding process I have a very, very bad result. Global RMS around 0,5 and huge shots of more than 3 arcsec. Axes RMS is around 0,4 arcsec.
To find good parameters has become drastically difficult.
Is that a different calculation of the deviation that might cause the problem or the parameters ?
Have you met same problems ?
Please Log in or Create an account to join the conversation.
- Hy Murveit
-

- Offline
- Administrator
-

- Posts: 1222
- Thank you received: 565
Replied by Hy Murveit on topic Difficulties using new autoguiding parameters
Sorry about the difficulties. The scheme itself hasn't changed much, so you should get similar or slightly better performance. However there are a few things to think about. I hope these are helpful:
- The main thing I'd look at is calibration. The calibration is now fully used. Previously only the direction was used, now both direction and "strength" (how many milliseconds of push is required to move an arc-second). So, make sure you have a good calibration, if you are re-using calibrations, which is what I'd recommend.
- Make sure your parameters related to camera pixel size and focal length are correct.
- The parameter values for aggressiveness and min-pulse were reset to defaults, since their scales changed. If you have tuned them, look again there.
- Similarly the GPG aggressiveness parameter was removed and it now uses the standard RA aggressiveness parameter. If you tuned that, please look at it again.
Hy
Please Log in or Create an account to join the conversation.

Replied by hades on topic Difficulties using new autoguiding parameters
Please Log in or Create an account to join the conversation.
Replied by Patrick on topic Difficulties using new autoguiding parameters
A transition period would have been a good choice. Just to give time to mount users to share the best practices on new algorithm.
Please Log in or Create an account to join the conversation.
- maxthebuilder
-

- Away
- Platinum Member
-

- Posts: 912
- Thank you received: 86
Replied by maxthebuilder on topic Difficulties using new autoguiding parameters
That is for two mounts - HEQ5 and RST-135.
Had to tweak parameters to make the guiding work right.
ZWO AM5. RST-135. AZ-GTI. HEQ5. iOptron SkyTracker.
TPO RC6. FRA400. Rokinon 135 and other lenses.
ZWO ASI2600MC. D5500 modified with UVIR clip-in filter.
ZWO ASI120MM Mini x 2. ZWO 30F4 guider. Orion 50mm guider.
ZWO EAF x 3.
Please Log in or Create an account to join the conversation.

Replied by Alfred on topic Difficulties using new autoguiding parameters
Of course this does not explain huge shots in your graphs which should not occur in the first place.
Please Log in or Create an account to join the conversation.
Replied by Patrick on topic Difficulties using new autoguiding parameters
I still use the 2x2 binning but the result is so worst. In fact the amplification of the deviations values are not really very important if they are equally distributed around 0.
The value of deviation is mostly contained in plus or minus 1.5 arcsec. The main problem before reducing the deviation are those huge shots of more than 3 arcsec that didn't exists on previous autoguiding processes.
For calibration I had to increase the pulse duration to 5000 to have a decent move of the mount overall in AR (2000 with previous version).
Under this value, the calibration curve looks to nothing good.
This didn't changed anything on the guiding process. It remains as bad as with a less calibration pulse of 2000.
For the moment I am fully lost in adjusting the values of the parameters for calibration and guiding.
As I don't have the chance to benefit of good weather conditions very often, I guess that will take a while to find the good values.
Maybe I will get back temporarily to PHD2 to improve the autoguiding process.
Please Log in or Create an account to join the conversation.
Replied by Alfred on topic Difficulties using new autoguiding parameters
Do you run releases, nightly builds or do you compile from git? In case you compile from git you can revert back to any version before the guiding problem came up.
Please Log in or Create an account to join the conversation.
Replied by Patrick on topic Difficulties using new autoguiding parameters
I usually use the current release. I don't use the nightly builds or compile from git. I compile only libindi and 3rd-party drivers from git when I remark a driver dysfunction (this was the case with QHY183M f or me).
Here for the autoguiding issues I used the current release.
Please Log in or Create an account to join the conversation.
Replied by Alfred on topic Difficulties using new autoguiding parameters
this
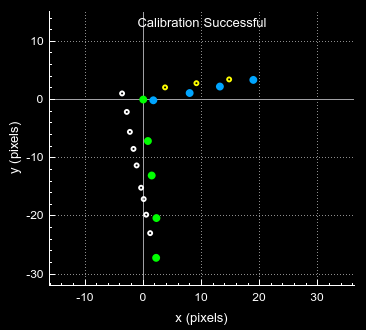
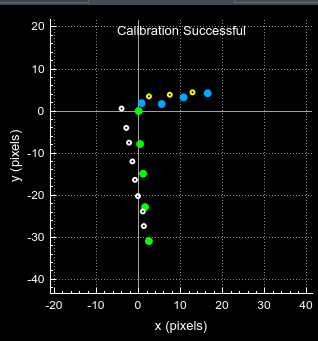
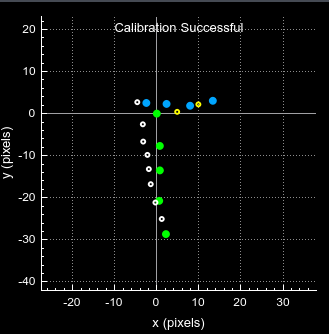
and guide graphs like this
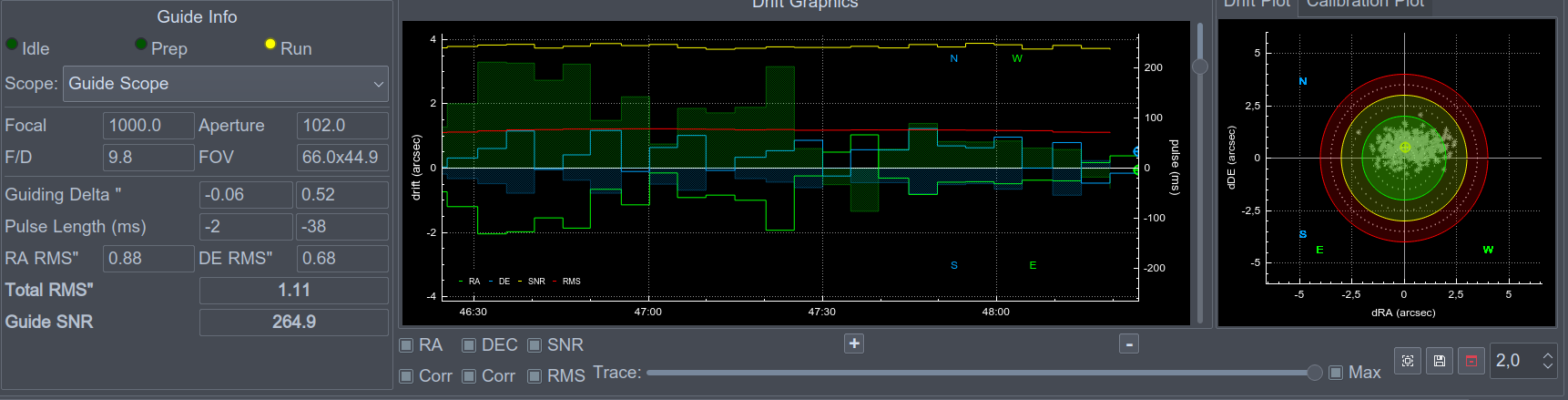
Nevertheless this testing session was productive for me since I think I found the root cause of an issue that I have been struggling with for quite some time. I'll write more about it in another thread. I'm intested in your further test results. Did you have a chance to run phd2 yet?
Attachments:
Please Log in or Create an account to join the conversation.
Replied by hades on topic Difficulties using new autoguiding parameters
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Offline
- Administrator
-
- Posts: 1222
- Thank you received: 565
Replied by Hy Murveit on topic Difficulties using new autoguiding parameters
- Aggressiveness for RA/DEC: 0.75 (you can use anything in the range of 0.4-0.8 probably to get started)
- Integral gain for RA/DEC: 0.0
- Minimum pulse for RA/DEC: 0.2 arc-seconds (again, don't need to be too exact at the start)
- Maximum pulse for RA/DEC: 25 arc-seconds (ditto--just trying to make sure the system doesn't do anything too crazy)
- Estimate period: checked, but see below
- Major period (seconds): you need to look this up for your mount, and if you can be confident in the value, then use that and uncheck estimate period. Otherwise, you can let it run for a half hour and see what value it gets, note that, and uncheck the estimate period if you're happy with RA guiding.
- Prediction gain: 0.5
Please Log in or Create an account to join the conversation.