INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Meridian Flip and other meridian issues with iOptron CEM25P
- Gonzothegreat
-

- Offline
- Moderator
-

- Posts: 2255
- Thank you received: 223
Replied by Gonzothegreat on topic Meridian Flip and other meridian issues with iOptron CEM25P
My USB cable should be there in a few days time, I will be able to test this park & meridian flip soon.
Please Log in or Create an account to join the conversation.
- Jose Corazon
-

- Offline
- Supernova Explorer
-

- Posts: 1119
- Thank you received: 182
Replied by Jose Corazon on topic Meridian Flip and other meridian issues with iOptron CEM25P
Works great.
Please Log in or Create an account to join the conversation.
- Nico Augustin
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

- Posts: 48
- Thank you received: 8
Replied by Nico Augustin on topic Meridian Flip and other meridian issues with iOptron CEM25P
Its almost the same with me, I usually only use the HC to set and store the home position now and then as well as slew it back to the home position if Ekos fails to do that.
So, I guess, seeing all this different Flip XY degrees past meridian settings in the HC it is not an issue with the HC or the mount. I have mine set to UTC+120min, DST=N and to perform a flip at 3deg past meridian.
I did used Mount updates KStars because to make use of the GPS and I have it now on KStars updates mount - either way it did not work.
Can someone of you maybe share the mount settings in INDI and Ekos? May I can find any difference in comparing those.
Please Log in or Create an account to join the conversation.
- Wouter van Reeven
-

- Offline
- Supernova Explorer
-
- Posts: 1957
- Thank you received: 420
Replied by Wouter van Reeven on topic Meridian Flip and other meridian issues with iOptron CEM25P
Wouter
Please Log in or Create an account to join the conversation.
- Gonzothegreat
-
- Offline
- Moderator
-
- Posts: 2255
- Thank you received: 223
Replied by Gonzothegreat on topic Meridian Flip and other meridian issues with iOptron CEM25P
Go2Nova 8408 hand controller firmware (V190422) (Released 1/31/2020)
CEM25 R.A. motor control board (V190422)
CEM25 DEC motor control board (V170106)
source
Please Log in or Create an account to join the conversation.
- Nico Augustin
-
Topic Author
- Offline
- Senior Member
-
- Posts: 48
- Thank you received: 8
Replied by Nico Augustin on topic Meridian Flip and other meridian issues with iOptron CEM25P
Dank je wel Wouter - I will have a look into that when I´m back home tonight
")
Please Log in or Create an account to join the conversation.
- Wouter van Reeven
-
- Offline
- Supernova Explorer
-
- Posts: 1957
- Thank you received: 420
Replied by Wouter van Reeven on topic Meridian Flip and other meridian issues with iOptron CEM25P
Correct. See my post here www.indilib.org/forum/ekos/7753-meridian....html?start=24#60677
Please Log in or Create an account to join the conversation.
- Nico Augustin
-
Topic Author
- Offline
- Senior Member
-
- Posts: 48
- Thank you received: 8
Replied by Nico Augustin on topic Meridian Flip and other meridian issues with iOptron CEM25P
I finally copared your XML file with mine and I dont see any difference apart from one turned entry in the right beginning. Though I could not figure out what that means...
This is mine:
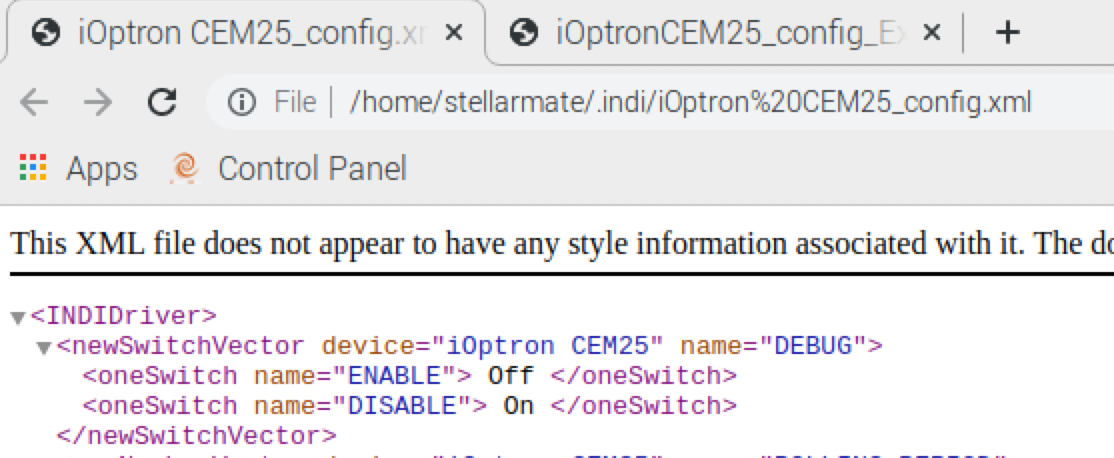
Showing after "DEBUG" the "ENABLE" on OFF and the DISABLE on ON
This is the example
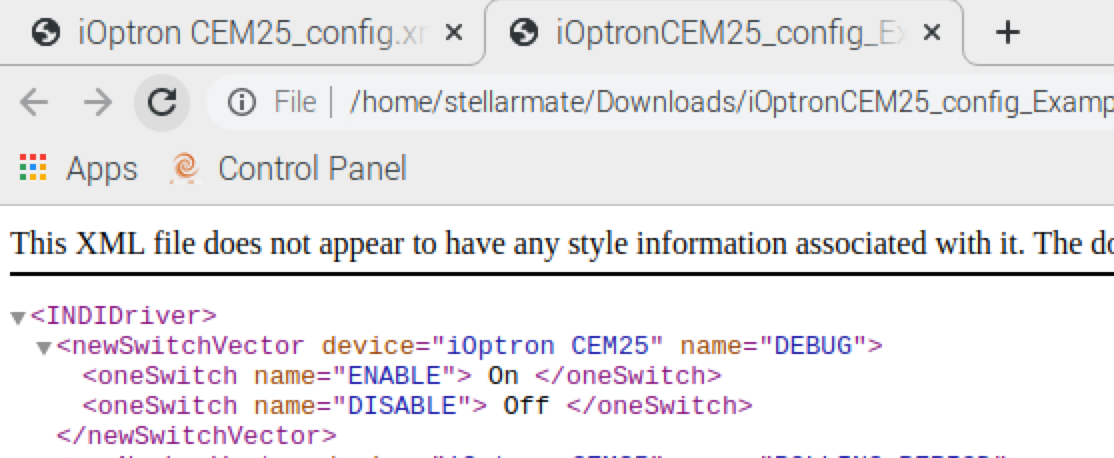
Showing after "DEBUG" the "ENABLE" on ON and the DISABLE on OFF
No further differences in the whole file - they are (appart from the location coordinates) indentical.
Please Log in or Create an account to join the conversation.
- Wouter van Reeven
-
- Offline
- Supernova Explorer
-
- Posts: 1957
- Thank you received: 420
Replied by Wouter van Reeven on topic Meridian Flip and other meridian issues with iOptron CEM25P
Please Log in or Create an account to join the conversation.
- Jose Corazon
-
- Offline
- Supernova Explorer
-
- Posts: 1119
- Thank you received: 182
Replied by Jose Corazon on topic Meridian Flip and other meridian issues with iOptron CEM25P
Please Log in or Create an account to join the conversation.
- Nico Augustin
-
Topic Author
- Offline
- Senior Member
-
- Posts: 48
- Thank you received: 8
Replied by Nico Augustin on topic Meridian Flip and other meridian issues with iOptron CEM25P
In the HC there it seems that only two things could screw it up: the time and location tab or the meridian handle tab. Both we checked several times now and the time and position is syncronized between KStars and the mount. obviously it doesn´t matter who is updating whom as long as both are sychrone and DST is off. Even if I try with settings suggested from users that have no issues it´s not working.
Can it be that the KStars version on my StellarMate causes this issue? I have v.3.5.0 BETA running on it (BULD 2020-08-29T02:41:24Z).
I did not actively choose for it and it was installed automatically (even if I did set the software updates to STABLE in the StellarMate settings). Also the circumstance that I can´t get a Log-file (wich I succesfully did before) is letting me think that something with my version is not right.
I will install KStars on Windows now just to test if it´s a problem with my Raspi´s KStars... Will report as soon as I know.
Cheers, Nico
Please Log in or Create an account to join the conversation.
- Wouter van Reeven
-
- Offline
- Supernova Explorer
-
- Posts: 1957
- Thank you received: 420
Replied by Wouter van Reeven on topic Meridian Flip and other meridian issues with iOptron CEM25P
Hoi Nico,
Interesting. I occasionally notice, epecially after an imaging session, that the scope doesn't go back to the zero position but that both axes are slighlty off. I notice because we marked the zero positions.
Groetjes, Wouter
Please Log in or Create an account to join the conversation.