INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Astroberry Focuser with Adafruit Motor HAT
Replied by wei chen on topic Astroberry Focuser with Adafruit Motor HAT
Do you guys know how to work around this problem? is this parameter a must for the program to work?
Thanks.
Please Log in or Create an account to join the conversation.

Replied by Andrew on topic Astroberry Focuser with Adafruit Motor HAT
Please Log in or Create an account to join the conversation.
Replied by wei chen on topic Astroberry Focuser with Adafruit Motor HAT
I need to look at the code more closely to figure out what exactly i need to provide for the focuser to work.
At the Ekos UI side, it looks i only need to set the ticks properties for the Max Travel
Settings
Max Travel: Maximum travel in ticks before the autofocus process aborts.
Step: Initial step size in ticks to cause a noticeable change in HFR value.
Tolerance: The tolerance percentage values decides when the autofocus process stops in the Iterative algorithm.
Please Log in or Create an account to join the conversation.
- Gunther Fleerackers
-

- Offline
- New Member
-

- Posts: 16
- Thank you received: 0
Replied by Gunther Fleerackers on topic Astroberry Focuser with Adafruit Motor HAT
I have ordered te ADAFruit DC and stepper motor HAT for raspberry PI 3b+ to build my focusser. Any suggestions on the type of stepper motor I should buy with it?
Kind regards,
Gunther
Telescope : Skywatcher HEQ5 /
Camera : Canon 700D
Please Log in or Create an account to join the conversation.
- Radek Kaczorek
-

- Offline
- Moderator
-

- Posts: 983
- Thank you received: 375
Replied by Radek Kaczorek on topic Astroberry Focuser with Adafruit Motor HAT
Please Log in or Create an account to join the conversation.

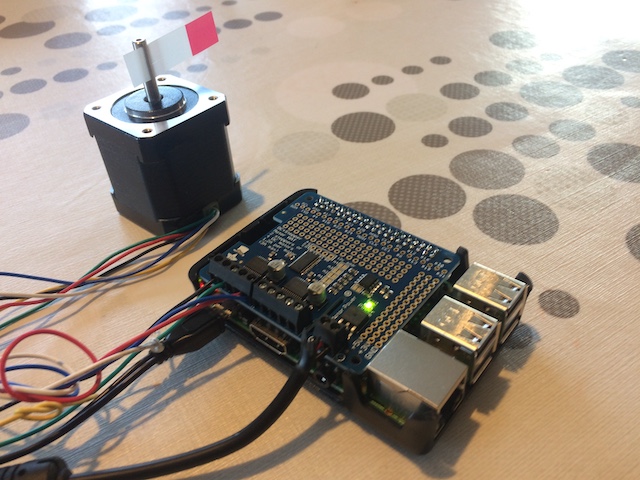
Replied by Helge on topic Astroberry Focuser with Adafruit Motor HAT
This shows how it can be attached:
github.com/HelgeMK/FocuserParts/blob/mas...icture%20Focuser.jpg
To be honest, I do not know what the best gear ratio is.
Please Log in or Create an account to join the conversation.
- Gunther Fleerackers
-
- Offline
- New Member
-
- Posts: 16
- Thank you received: 0
Replied by Gunther Fleerackers on topic Astroberry Focuser with Adafruit Motor HAT
By the end of the week the Adafruit Motor HAT will be in my local store. I'll ask for a 12V stepper motor and try to get that to work. Then I will begin with step two: putting it on my telescope. I have a Starway Crayford Focusser with a 10:1 micro focussing. A canon 700D will be attached to it.

This will be my second electronic DIY project after putting the raspberry PI together. So I'm a newbie on this topic
")
Gunther
Telescope : Skywatcher HEQ5 /
Camera : Canon 700D
Please Log in or Create an account to join the conversation.
- Gunther Fleerackers
-
- Offline
- New Member
-
- Posts: 16
- Thank you received: 0
Replied by Gunther Fleerackers on topic Astroberry Focuser with Adafruit Motor HAT
After installing the python driver I made a script so I could test the stepper motor. It all works well
Next step was installing the astroberry-diy. I followed the steps written on GitHub. I can find the focusser in Ekos. There is no error message, but the focusser is probably not working cause he doesn't respond.
I used the command : cmake -DWITH_WIRINGPI=OFF -DCMAKE_INSTALL_PREFIX=/usr ..
The Adafruit Motor HAT is working through GPIO, should i use the option -DWITH_WIRINGPI=ON ? Or do I need to do something else?
kind regards,
Gunther
Telescope : Skywatcher HEQ5 /
Camera : Canon 700D
Please Log in or Create an account to join the conversation.
- Radek Kaczorek
-
- Offline
- Moderator
-
- Posts: 983
- Thank you received: 375
Replied by Radek Kaczorek on topic Astroberry Focuser with Adafruit Motor HAT
Good luck!
Please Log in or Create an account to join the conversation.
Replied by Andrew on topic Astroberry Focuser with Adafruit Motor HAT
Thanks.
Please Log in or Create an account to join the conversation.
- Gunther Fleerackers
-
- Offline
- New Member
-
- Posts: 16
- Thank you received: 0
Replied by Gunther Fleerackers on topic Astroberry Focuser with Adafruit Motor HAT
Can you make something out of this message?
[ 10%] Performing update step for 'libAdafruitStepperMotorHAT'
Current branch master is up to date.
No stash found.
No stash found.
No stash found.
CMake Error at /home/stellarmate/astroberry-amh/build/libs/AdafruitStepperMotorHAT_CPP/tmp/libAdafruitStepperMotorHAT-gitupdate.cmake:136 (message):
Failed to unstash changes in:
'/home/stellarmate/astroberry-amh/libs/AdafruitStepperMotorHAT_CPP/'.
You will have to resolve the conflicts manually
CMakeFiles/libAdafruitStepperMotorHAT.dir/build.make:94: recipe for target 'libs/AdafruitStepperMotorHAT_CPP/src/libAdafruitStepperMotorHAT-stamp/libAdafruitStepperMotorHAT-update' failed
make[2]: *** [libs/AdafruitStepperMotorHAT_CPP/src/libAdafruitStepperMotorHAT-stamp/libAdafruitStepperMotorHAT-update] Error 1
CMakeFiles/Makefile2:67: recipe for target 'CMakeFiles/libAdafruitStepperMotorHAT.dir/all' failed
make[1]: *** [CMakeFiles/libAdafruitStepperMotorHAT.dir/all] Error 2
Makefile:127: recipe for target 'all' failed
make: *** [all] Error 2
It looks I have probably an older version of wiringpi. Updating this first.
Telescope : Skywatcher HEQ5 /
Camera : Canon 700D
Please Log in or Create an account to join the conversation.
- Radek Kaczorek
-
- Offline
- Moderator
-
- Posts: 983
- Thank you received: 375
Replied by Radek Kaczorek on topic Astroberry Focuser with Adafruit Motor HAT
Remove build/libs/AdafruitStepperMotorHAT_CPP before make install
OR
after make (it goes successfully) manually copy indi_amh_focuser to /usr/bin and indi_amh_focuser.xml to /usr/share/indi
Please Log in or Create an account to join the conversation.