INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi
- Kevin Ross
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 421
- Thank you received: 102
Replied by Kevin Ross on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
Also, the sending of pulses to the stepper isn't timed as precisely as on a 3D printer, which runs a single program on a microcontroller, and not a full multitasking operating system. So on the Pi, the sending of the pulses to the stepper will never be as smooth as on a 3D printer.
BTW, I have a Creality Ender 5. What do you have?
Please Log in or Create an account to join the conversation.
- Eric Brown
-

- Offline
- Senior Member
-

- Posts: 59
- Thank you received: 3
Replied by Eric Brown on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
I did add the driver "i2c-bcm2708" to the /etc/modules file. Maybe I missed something else? I had tried a bunch of things originally trying to get it to work when rooting from the SD card.
Please Log in or Create an account to join the conversation.
- Kevin Ross
-
Topic Author
- Offline
- Elite Member
-
- Posts: 421
- Thank you received: 102
Replied by Kevin Ross on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
But I'm running Raspbian, not SM
I might have to shell out the $50 or whatever and download a copy of SM just for testing.
")
Please Log in or Create an account to join the conversation.
- Eric Brown
-
- Offline
- Senior Member
-
- Posts: 59
- Thank you received: 3
Replied by Eric Brown on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
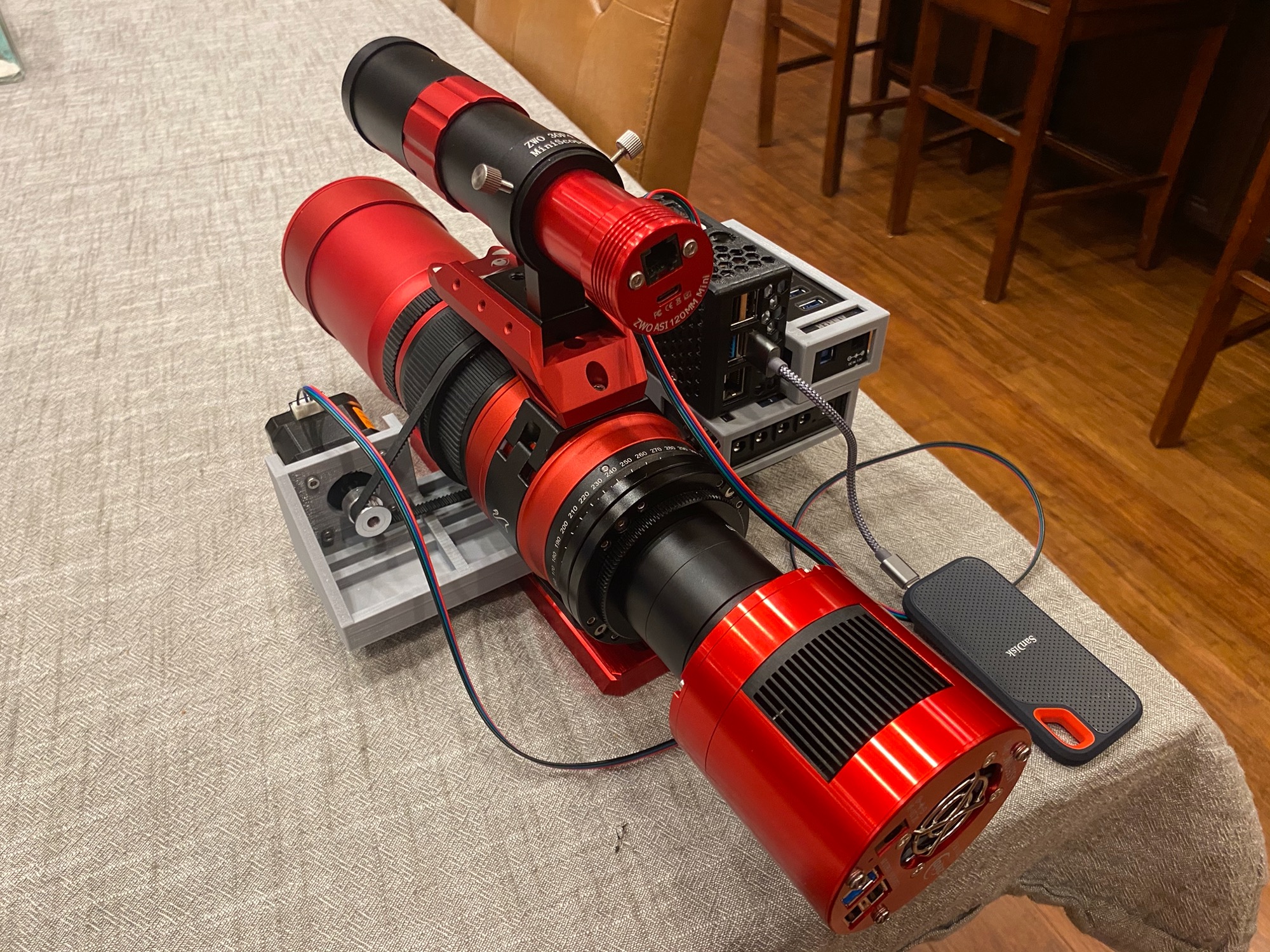
I've got a Prusa i3 mk3. I have a bunch of new designs for my RedCat 51. The first base to mount the stepper on one side and a quick release arca-swiss plate on the other. I created a custom ring/pulley that slides over the focuser on the RedCat that has 2GT teeth on the outside for a closed loop 2GT belt. Then a couple of enclosures to hold a Pegasus Pocket Power Box and a Anker USB hub. The enclosures are mostly open and the PPB and hub slide in with a latching end piece on each. I also created a custom case for the rPi4 with stepper hat. The hub enclosure and pi case attach to the PPB which has a dovetail on the bottom to connect to the quick release plate. That way I can easily move it to another scope (assuming I eventually get another) or to break it down for travel. I'll share pics and designs once its all complete and working.
Please Log in or Create an account to join the conversation.
- Eric Brown
-
- Offline
- Senior Member
-
- Posts: 59
- Thank you received: 3
Replied by Eric Brown on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
SM is great in that it has everything pre-installed to work out of the box with a few useful extras. I'm also very happy to support the work that Jasem is doing. IMHO, $50 is a very small price to pay. The value in what is available here far, far exceeds that. The fact that its open source makes it even more valuable.
Please Log in or Create an account to join the conversation.
- Kevin Ross
-
Topic Author
- Offline
- Elite Member
-
- Posts: 421
- Thank you received: 102
Replied by Kevin Ross on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
Also, I never needed to run indiserver as root. The user I run as (pi) is a member of the gpio group in /etc/group. Is the user you're running as a member of the gpio group?
Please Log in or Create an account to join the conversation.
- Eric Brown
-
- Offline
- Senior Member
-
- Posts: 59
- Thank you received: 3
Replied by Eric Brown on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
Please Log in or Create an account to join the conversation.
- Jon Carleton
-

- Offline
- Elite Member
-
- Posts: 215
- Thank you received: 16
Replied by Jon Carleton on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
Please Log in or Create an account to join the conversation.
- Jon Carleton
-
- Offline
- Elite Member
-
- Posts: 215
- Thank you received: 16
Replied by Jon Carleton on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
I originally started with an Arduino with a HAT driving a NEMA 17. It worked, but I had to use a Java program to talk to the Arduino, as I didn't find any existing driver for INDI at the time. I use a Pi for my INDI server on the scope, so finding your solution with the WaveShare HAT was exactly what I was looking for. It was seamless and works well with the NEMA 17, given the gear setup I used to connect to the stock SkyWatcher Crayford focuser.
I am running Raspbian on the Pi4 without permission issues. However, I do plan to move to Ubuntu when they get the bugs out of their 64bit desktop version. I did try the 64bit server version, but it seemed a bit unstable on the Pi4. If I have permission issues, I can deal with them at the OS level unless you tell me there is some other reason to move to this new release. The version I used is about a month old.
Your instructions were excellent. All went as planned. I get about 2400 clicks per full focus extent out of my geared setup, and that seems good enough for my uses presently.
THANK YOU THANK YOU THANK YOU!!!!
Please Log in or Create an account to join the conversation.
- Kevin Ross
-
Topic Author
- Offline
- Elite Member
-
- Posts: 421
- Thank you received: 102
Replied by Kevin Ross on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
Wow, that is weird. If you find out definitively what caused it to stop working, be sure to let us know.
Are you still running indiserver as root? Did you need to add your user to the gpio group so you could run as non-root?
Please Log in or Create an account to join the conversation.
- Kevin Ross
-
Topic Author
- Offline
- Elite Member
-
- Posts: 421
- Thank you received: 102
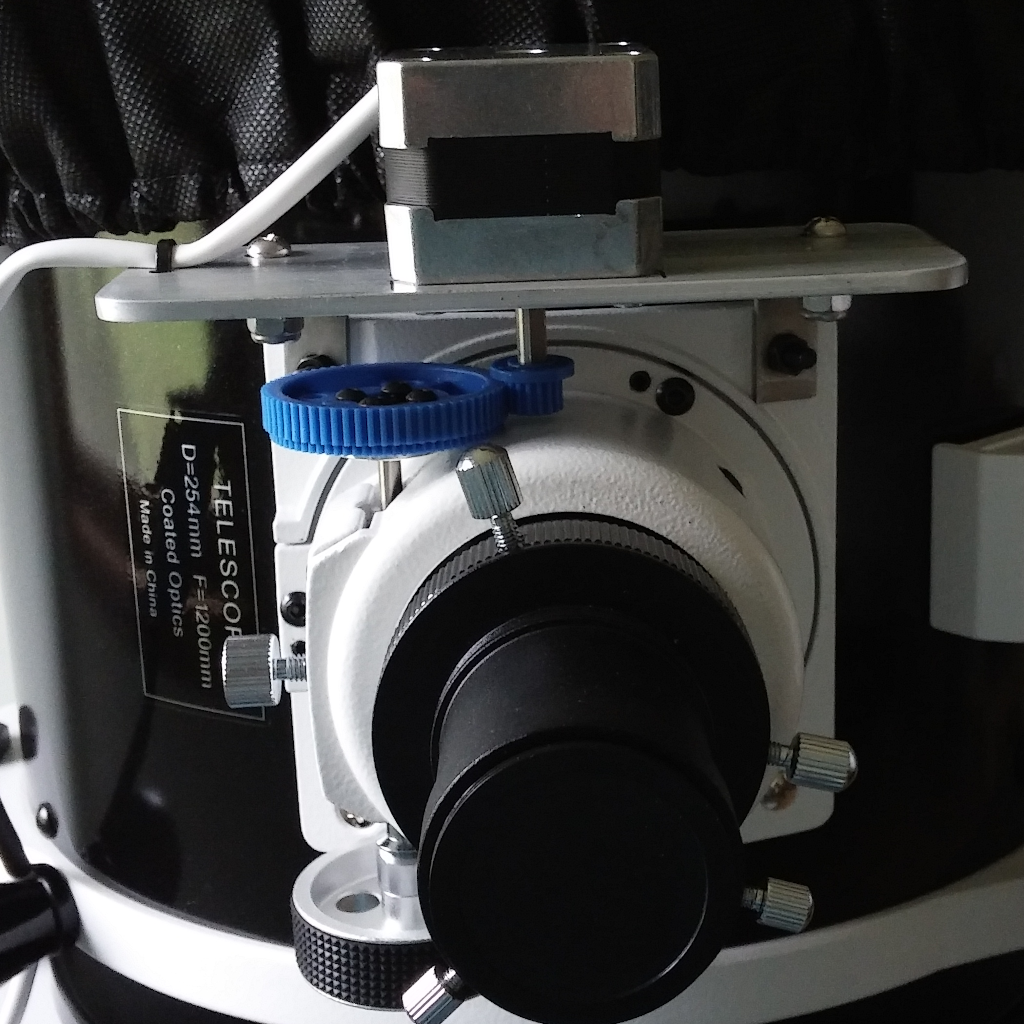
Replied by Kevin Ross on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
Jon,
Looking good! On my setup, I attached the motor directly to the fine focus knob, so no extra gear reduction was needed. If I were to attach to the coarse focus knob, then I would have needed some gear reduction like you have.
I'm very glad to hear that you got it up and running with no fuss.
Please Log in or Create an account to join the conversation.
- Eric Brown
-
- Offline
- Senior Member
-
- Posts: 59
- Thank you received: 3
Replied by Eric Brown on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
I've been setting the setuid bit on the indi_wmh_focuser executable. I'm guessing that things will work if I add the stellarmate user to the gpio group. I haven't tried that yet.
While we're sharing, here's my work in progress:
Please Log in or Create an account to join the conversation.