INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
New All Sky camera management software: indi-allsky
- Aaron Morris
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
I found another method using OpenCV template matching that is much faster and more sensitive.
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-

- Away
- Administrator
-

Replied by Jasem Mutlaq on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
From reading the documentation, it seems to be best described as finding instances of a picture within another picture. You can use this for complex pattern matching, but stars are very simple objects. In most of the examples I looked at, they included an example image of a star. In my case, instead of using a real star image, I just generate a fake star image using cv2 by drawing a white circle and applying a blur() function to it--a perfect star every time.
As for the speed, it is one of the faster methods I have used. It can find all of the stars in a 1920x1080 image covering 120 degress of the sky in about a second. The only problem is that it generates a lot of duplicate findings, finding the same star multiple times. Eliminating the duplicates slows things down a lot, but still *at least* 2-3 times faster than scikit-image blob_dog() for similar results. It is not perfect, but it is good enough for my purposes.
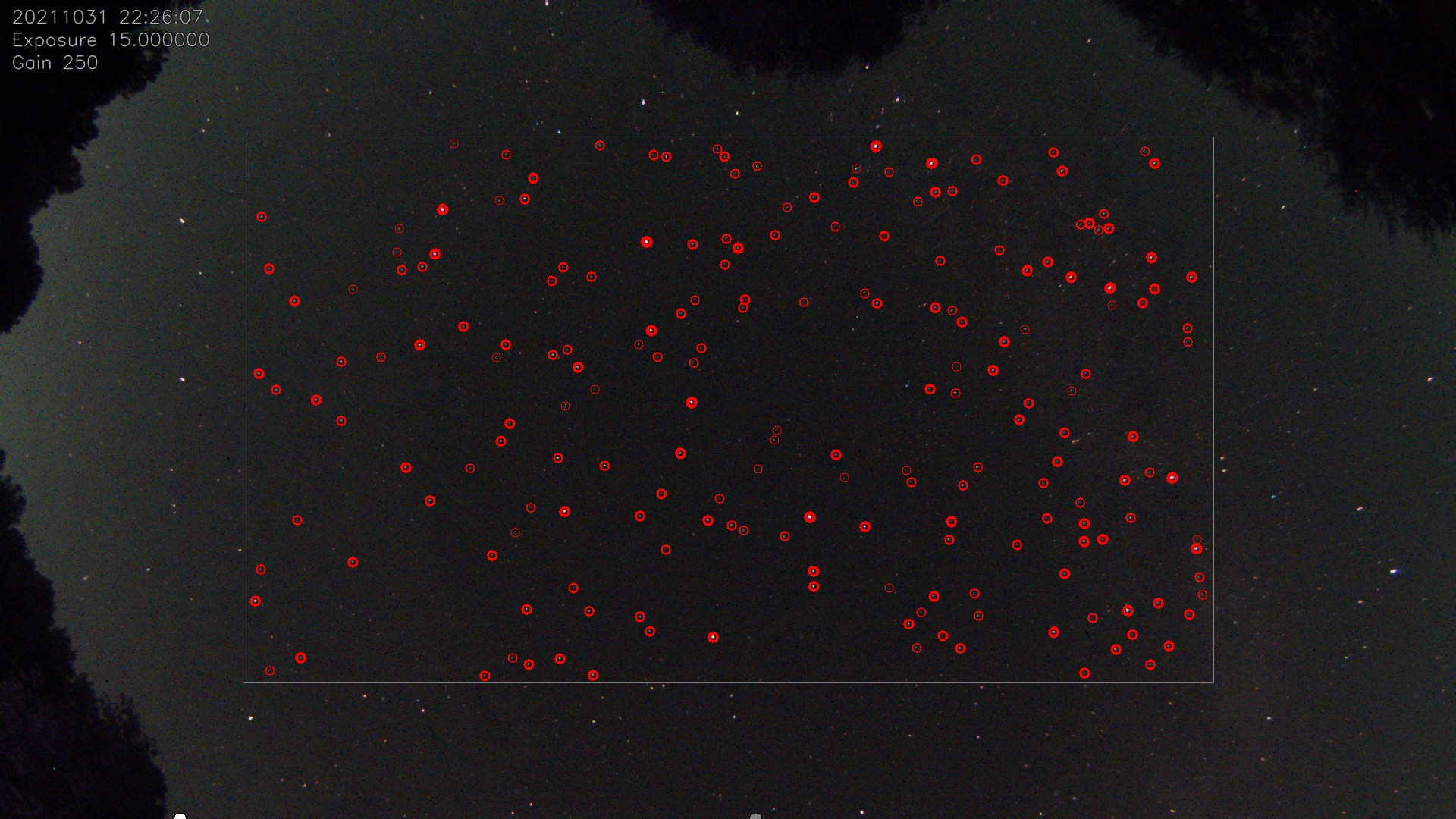
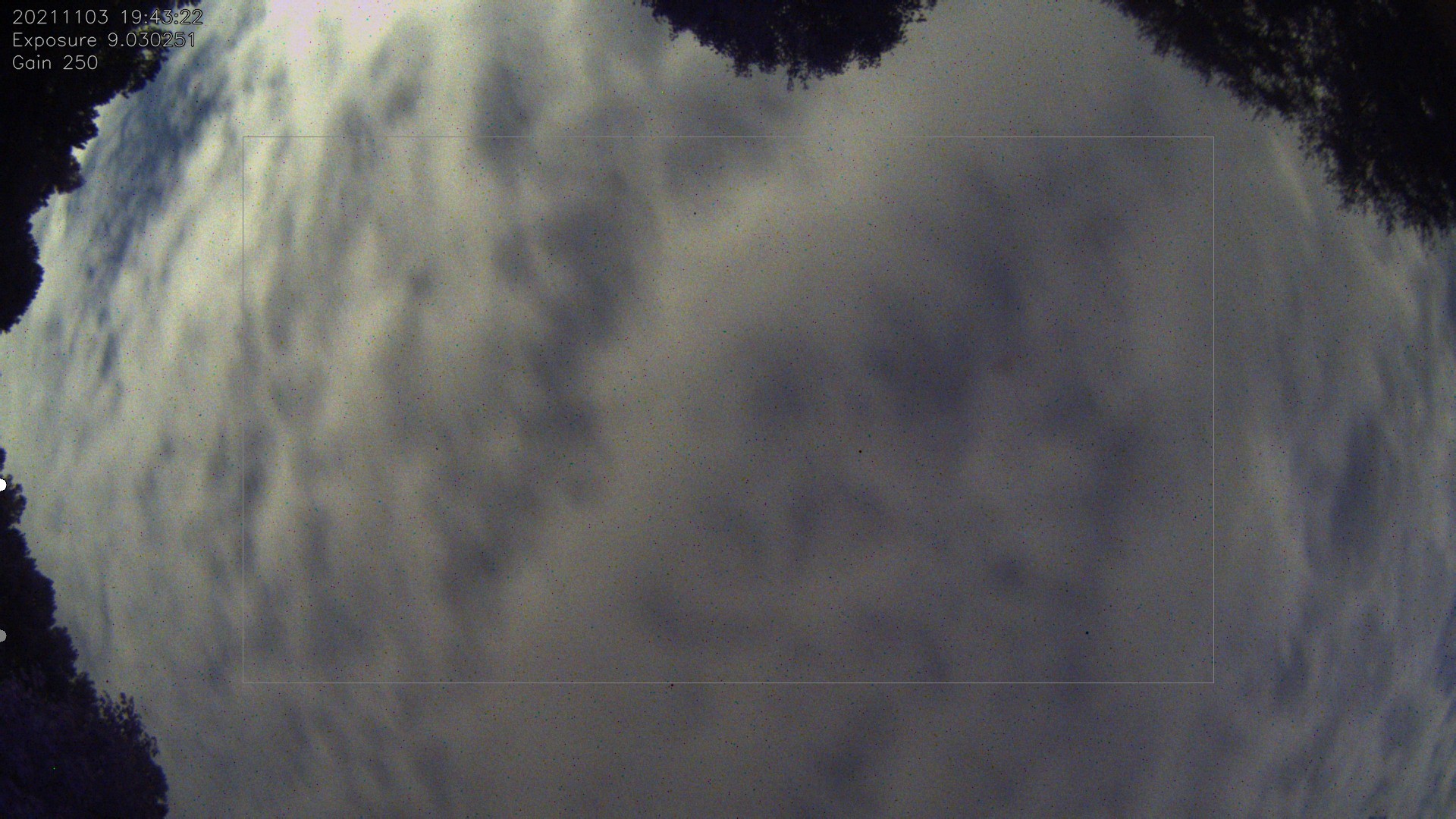
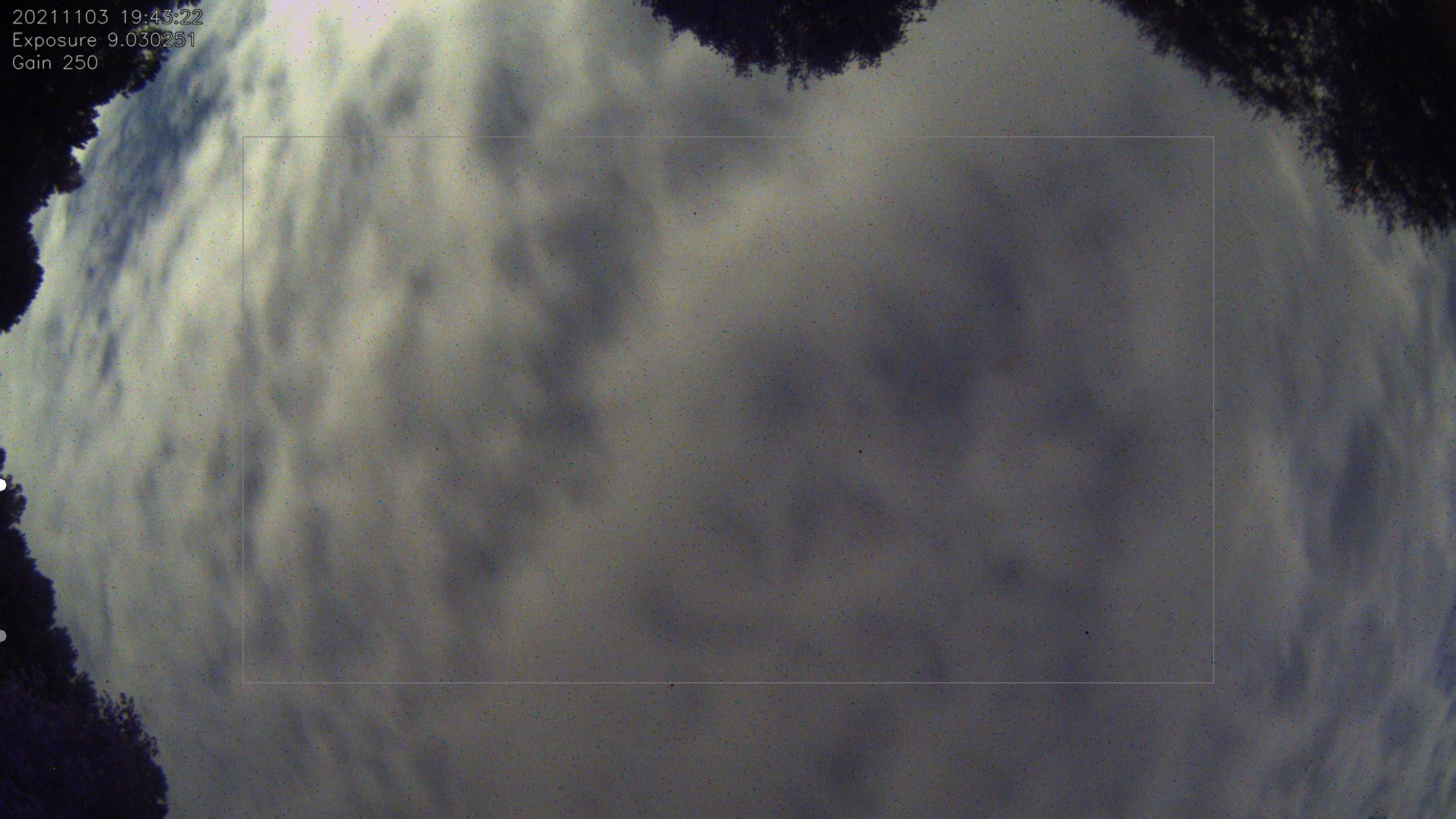
Here is an example. I only look for patterns in the central box of the image. This is to stay away from the trees. The gaps in the leaves look like stars to the pattern matching.
1035 "stars" were detected in 0.5 seconds on a Raspberry PI 3. The brighter the red circle, the more times it was duplicated.
Eliminating the duplicates brings the star count to 198 which adds another 2 seconds to processing.
Attachments:
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Away
- Administrator
-
Replied by Jasem Mutlaq on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.
- Martin Lines
-
- Offline
- New Member
-

- Posts: 10
- Thank you received: 1
Replied by Martin Lines on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky

I will post each set of test images for cv2 matchTemplate() and scikit blob_dog(). There is quite a bit of tuning that can be done to each method that can affect the results. You can increase sensitivity in one case but increase the false positive rate in another. The settings I have found seem to work well across each type of image I have.
cv2 settings:
stars = cv2.matchTemplate(image, star_template, cv2.TM_CCOEFF_NORMED)
stars_filtered = numpy.where(result >= 0.55)scikit settings:
stars = blob_dog(image, max_sigma=5, min_sigma=1, threshold=.1, overlap=0.1)Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
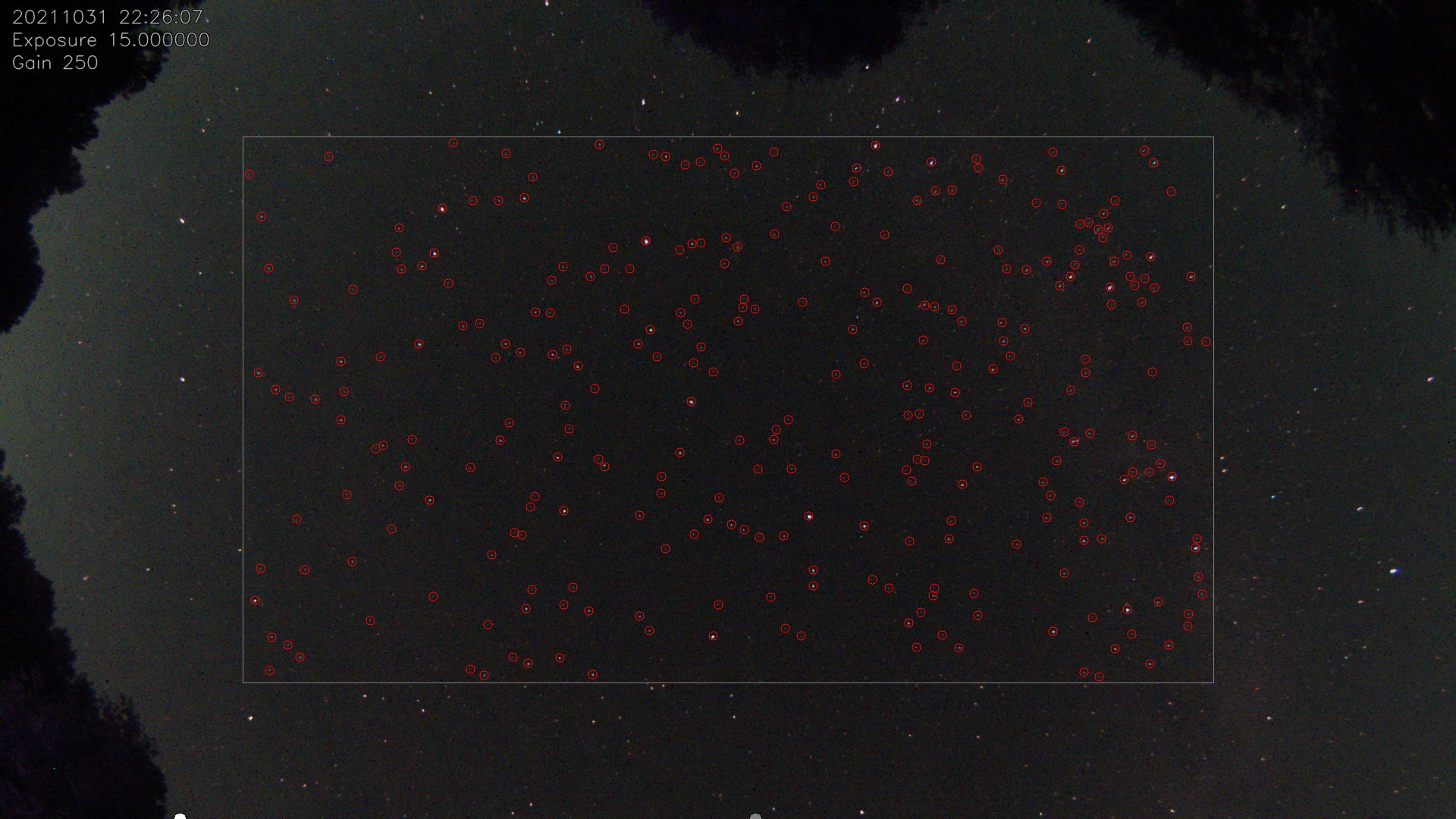
cv2 matchTemplate
INFO:root:SEP processing in 0.3813 s
INFO:root:Deduplication in 1.0220 s
INFO:root:Total in 1.4033 s
INFO:root:Found 297 objects
scikit blob_dog
INFO:root:SEP processing in 5.0061 s
INFO:root:Found 78 objects
Attachments:
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
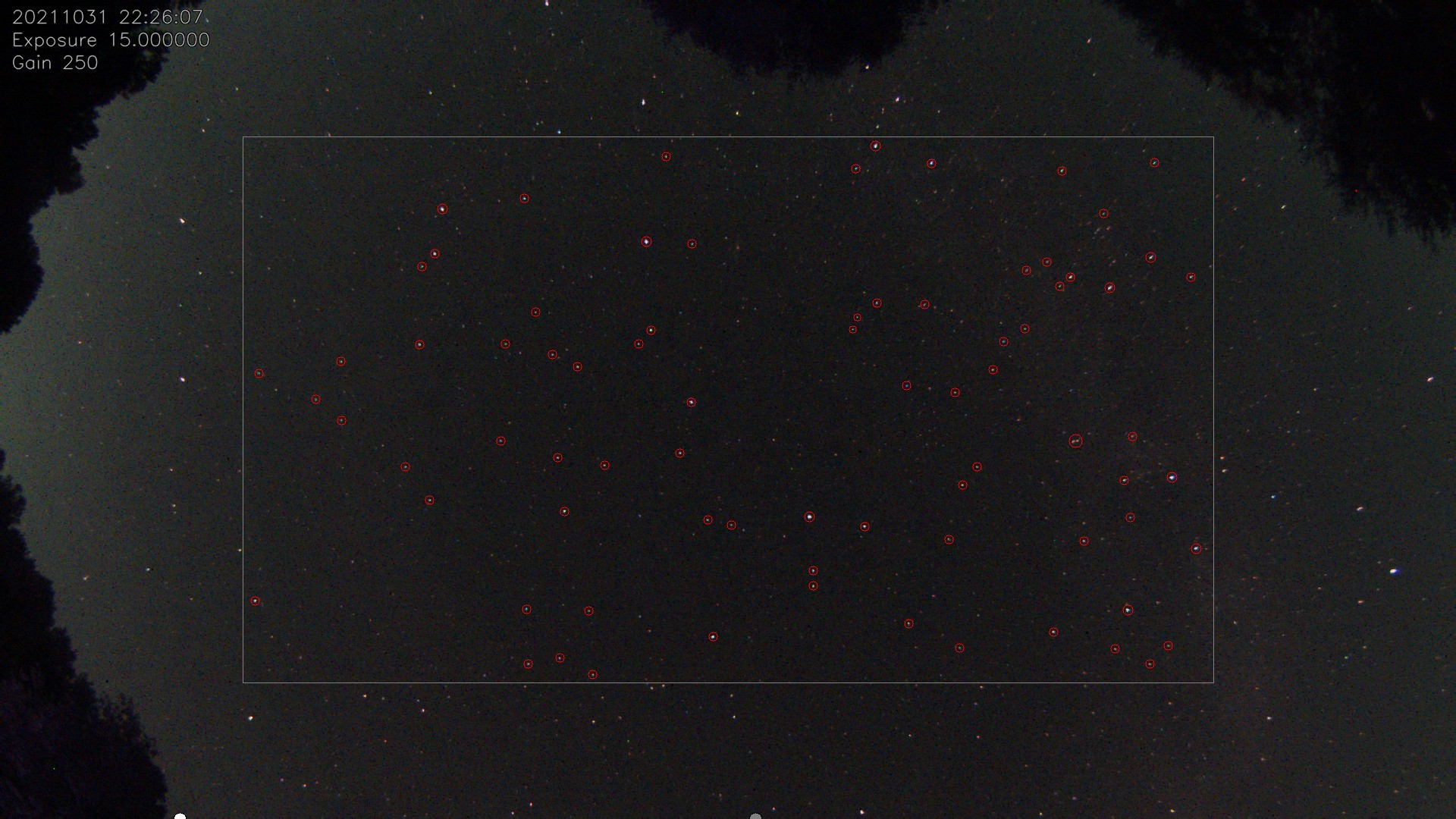
cv2 matchTemplate
INFO:root:SEP processing in 0.3807 s
INFO:root:Deduplication in 0.0089 s
INFO:root:Total in 0.3896 s
INFO:root:Found 27 objects
scikit blob_dog
INFO:root:SEP processing in 4.9986 s
INFO:root:Found 4 objects

Attachments:
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
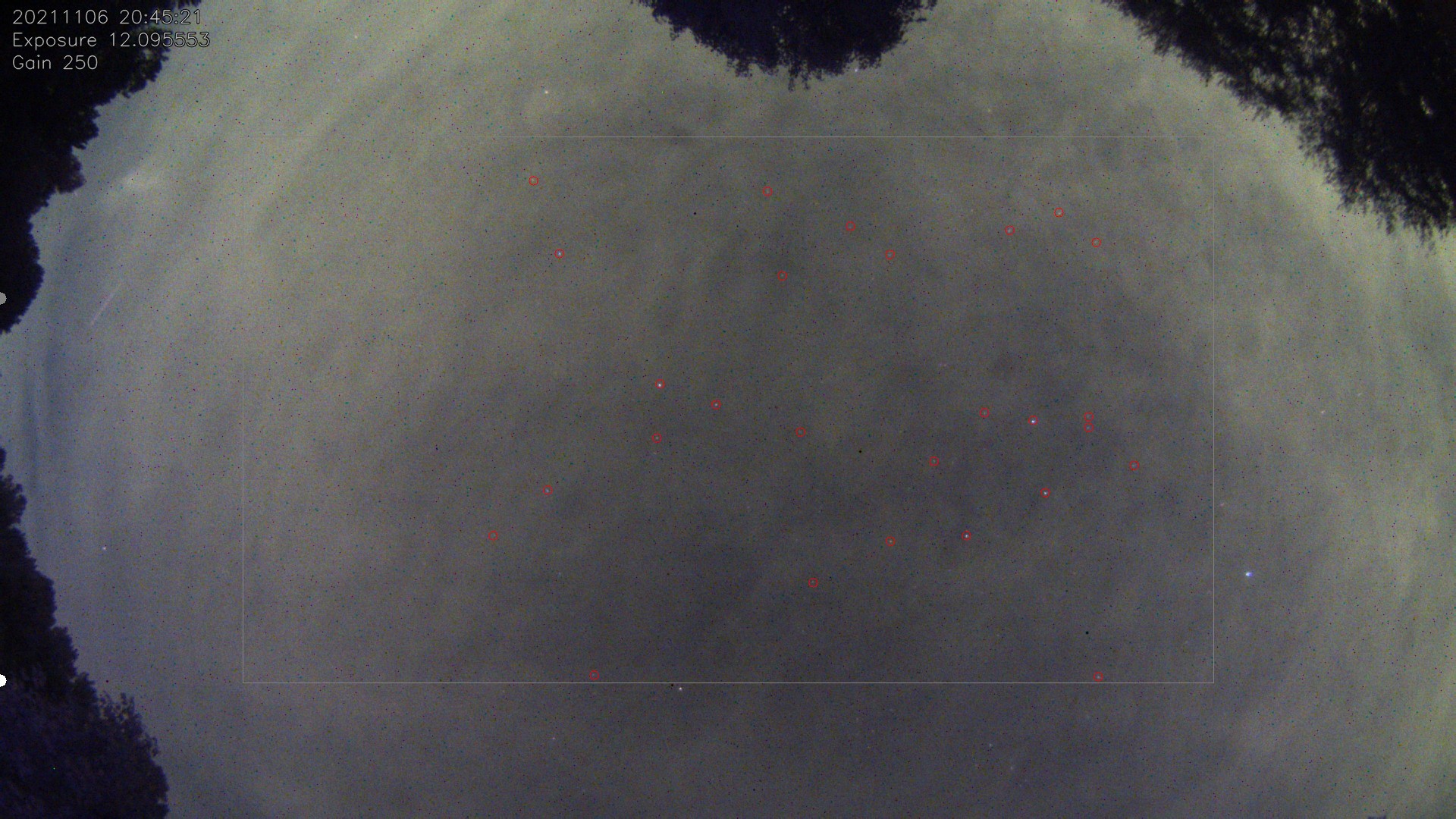
cv2 matchTemplate
INFO:root:SEP processing in 0.3782 s
INFO:root:Deduplication in 0.0001 s
INFO:root:Total in 0.3783 s
INFO:root:Found 0 objects
scikit blob_dog
INFO:root:SEP processing in 5.0570 s
INFO:root:Found 0 objects
Attachments:
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Away
- Administrator
-
Replied by Jasem Mutlaq on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.