INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
guide module (internal)
- Ron Kramer
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

guide module (internal) was created by Ron Kramer
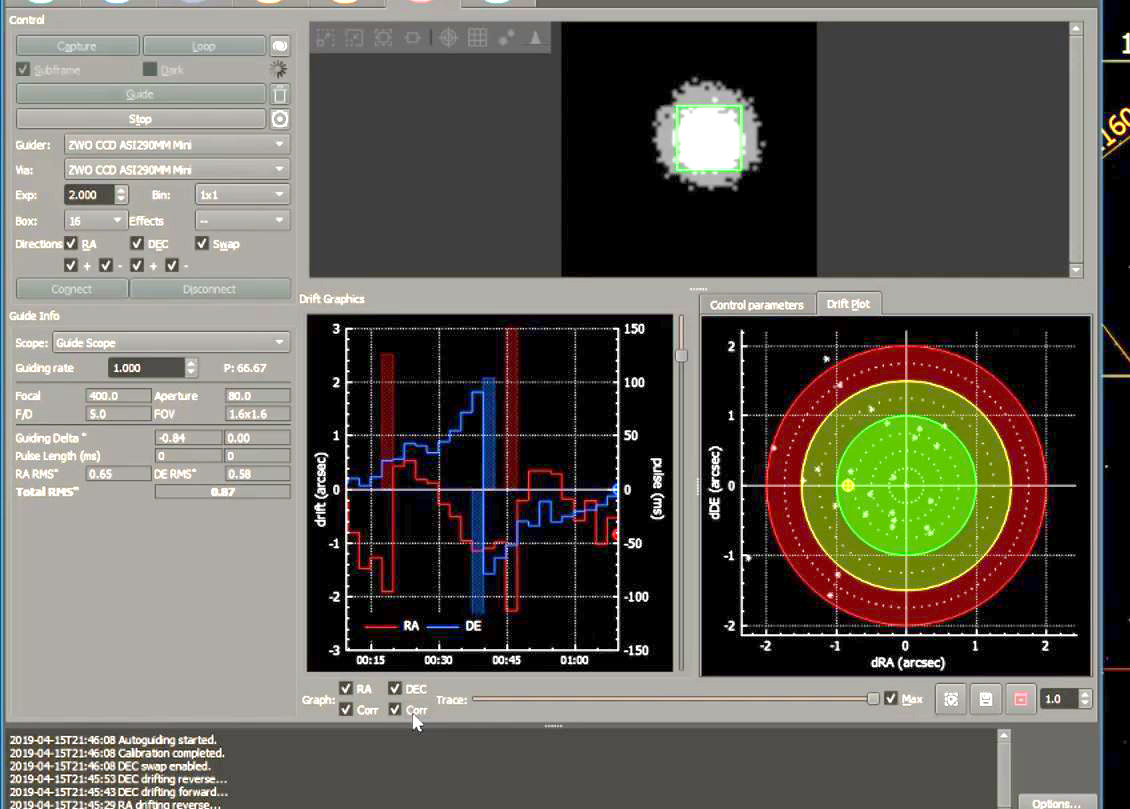
Jasem said I should keep it at least at 100. (but my mount wants min move setting in PHD to be really low) If I reduce that from 100 (default) to say 50 will it kick sooner? I'm assuming that's the move... required to get the correction to kick in? (min error to correct?)
I ask because below you can see the RA went off track TO FAR before correction was applied. And then the level of correction was to much and kicked the RA in the opposite direction just as far off! I adjust PHD to kick to the center line. What settings do I use to:
1. minium error for correction to be applied?
2. Agressiveness or (amount of correction kick back to center line-'0'.
Guiding works, but POORLY. I'd like to fine tune this. Also - do you think there is more error/lag in running internal guider on the PI and using VMS or team viewer? That would eliminate the trip to my desktop and the correction then sent back to the PI which might make corrections quicker?
Would guiding be better if I ran Kstars on a linux PC in the dome directly connected to the mount? )team viewer from in the house)?
I guess what I'm asking is - would eliminating the data trip to and from the desktop in the house correct the mount better and quicker? Is the driver on the pi running the guiding module or is Ekos in the house doing the observation and correction?
It shows corrections aren't applied until the error is +/- 2 arc sec! TO MUCH. I want to correct at .5 ac sec error. And increase from there if seeing is causing oscillations. (like I do with PHD).
My DEC was doing the same. That much error makes me feel I should go check my alignment. I may have bumped something swapping from the 6" apo to the RASA install.
EXP SCI - ED152cf APO - Celestron 11" RASA - Stellarvue 80mm
Baader F2 HS NB filters, Lodestar X2 guide camera / OAG - ZWO 290mm mini
ZWO ASI1600MM Pro / ASI174M (solar) / ASI094MC
NEXDome, CLoudwatcher, AVX mount/ASIair and Stellarmate
Please Log in or Create an account to join the conversation.
- Ron Kramer
-
Topic Author
- Offline
- Elite Member
-
Replied by Ron Kramer on topic guide module (internal)
!!! bug?
EXP SCI - ED152cf APO - Celestron 11" RASA - Stellarvue 80mm
Baader F2 HS NB filters, Lodestar X2 guide camera / OAG - ZWO 290mm mini
ZWO ASI1600MM Pro / ASI174M (solar) / ASI094MC
NEXDome, CLoudwatcher, AVX mount/ASIair and Stellarmate
Please Log in or Create an account to join the conversation.
- Jarno Paananen
-

- Offline
- Elite Member
-
- Posts: 474
- Thank you received: 168
Replied by Jarno Paananen on topic guide module (internal)
Please Log in or Create an account to join the conversation.
- Wouter van Reeven
-

- Offline
- Supernova Explorer
-

- Posts: 1957
- Thank you received: 420
Replied by Wouter van Reeven on topic guide module (internal)
Please Log in or Create an account to join the conversation.
- Jarno Paananen
-
- Offline
- Elite Member
-
- Posts: 474
- Thank you received: 168
Replied by Jarno Paananen on topic guide module (internal)
")
Please Log in or Create an account to join the conversation.

Replied by wotalota on topic guide module (internal)
Testing last night after a good polar alignment with new OAG setup, seeing described as poor, using pulse guiding, and the guiding was awful, could hear the mount slewing around trying to track.
However once again starting guide calibration had caused "Invalid pier side response from device" errors from AstroPhysics Experimental driver which can be found in the kstars log. So cancelled guiding and took 60 second test image unguided which came out with nice round stars. If it remains clear will try again tonight using the ST4 cable instead of pulse guiding.
Please Log in or Create an account to join the conversation.
- Ron Kramer
-
Topic Author
- Offline
- Elite Member
-
Replied by Ron Kramer on topic guide module (internal)
Recent. (last night) I was playing around somewhere and I saw a MACH1 indi driver I had never seen before? Is this new? outdated? as it didn't mention what GTO box was supported? I'm using experimental as well. But what of this mach1 mount driver?
I was using a OAG on my 6" APO - and pulse made for huge calibration (SLEWS) all across the sky. ST4 was better. But I need to figure out how to tweak controls... as I do in phd. I have min move down around 20 and Jasem said I should keep it at 100. (but I think the AP mount actually likes low min moves). I had it VERY LOW in PHD with excellent results.
EXP SCI - ED152cf APO - Celestron 11" RASA - Stellarvue 80mm
Baader F2 HS NB filters, Lodestar X2 guide camera / OAG - ZWO 290mm mini
ZWO ASI1600MM Pro / ASI174M (solar) / ASI094MC
NEXDome, CLoudwatcher, AVX mount/ASIair and Stellarmate
Please Log in or Create an account to join the conversation.
Replied by wotalota on topic guide module (internal)
Please Log in or Create an account to join the conversation.
- Ron Kramer
-
Topic Author
- Offline
- Elite Member
-
Replied by Ron Kramer on topic guide module (internal)
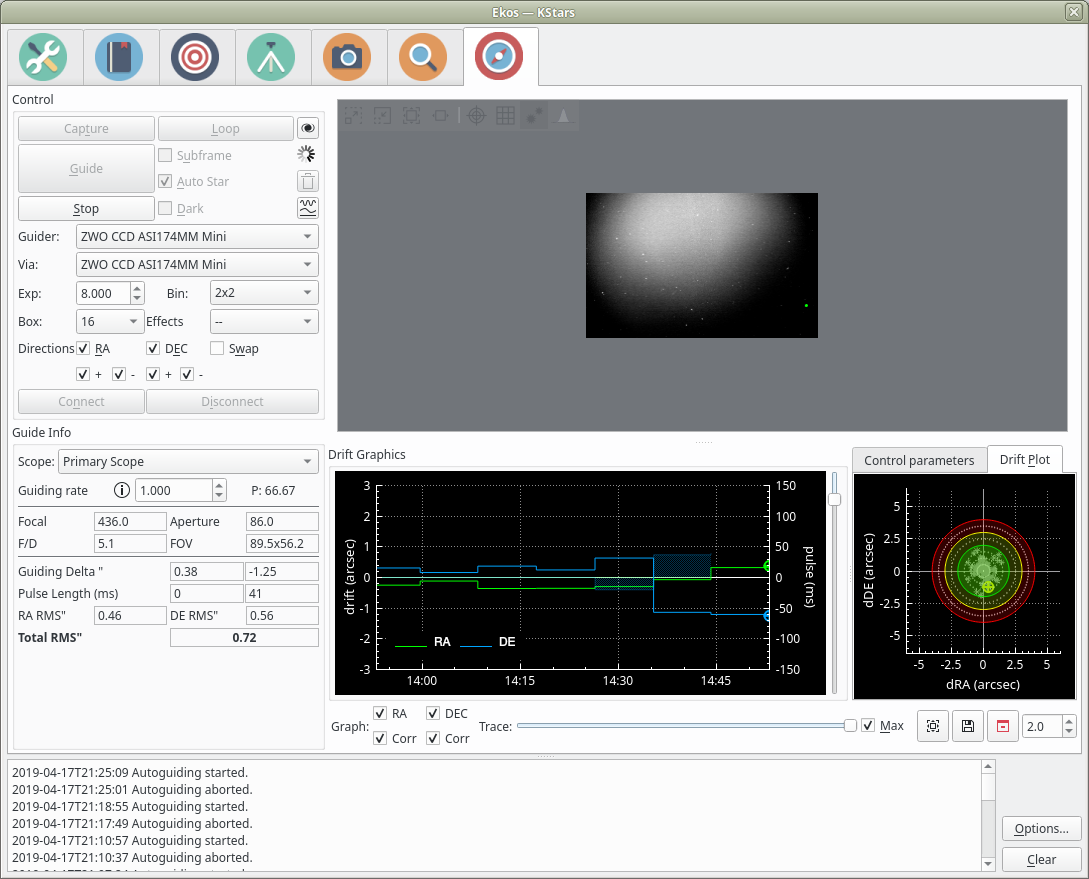
I was trying to guide a big refractor with a .64 image sale. I'd need to be under that for a RMS error. You were at .79 I think it read... I just switched to a RASA with a 1/3rd shorter focal length which will reduce my image scale (I THINK it's .84) about now. Before going to INDI PHD2 averaged around .35 and often was as good as .24
I wonder if it's the server/client delay.... since trying external PHD on the PI server resulted in nearly the same as the internal guider. I'm not sure of where the correction is being calculated. (on the pi or on the client). But at 8 second exposure any server/client communications time would be irrelevant it would seem. I'm talking low ms I'd say.
changing to the RASA was done to lower FL, but also to reduce exposure times. Having a guiding glitch during a 10-20 minute exposure was frustrating to say the least. So from F8 and 3nm astrodon filters to F2.2 and high speed baader nb filters - I hope to shoot more but shorter exposures.
EXP SCI - ED152cf APO - Celestron 11" RASA - Stellarvue 80mm
Baader F2 HS NB filters, Lodestar X2 guide camera / OAG - ZWO 290mm mini
ZWO ASI1600MM Pro / ASI174M (solar) / ASI094MC
NEXDome, CLoudwatcher, AVX mount/ASIair and Stellarmate
Please Log in or Create an account to join the conversation.
Replied by wotalota on topic guide module (internal)
Please Log in or Create an account to join the conversation.
- Ron Kramer
-
Topic Author
- Offline
- Elite Member
-
Replied by Ron Kramer on topic guide module (internal)
EXP SCI - ED152cf APO - Celestron 11" RASA - Stellarvue 80mm
Baader F2 HS NB filters, Lodestar X2 guide camera / OAG - ZWO 290mm mini
ZWO ASI1600MM Pro / ASI174M (solar) / ASI094MC
NEXDome, CLoudwatcher, AVX mount/ASIair and Stellarmate
Please Log in or Create an account to join the conversation.
- Ron Kramer
-
Topic Author
- Offline
- Elite Member
-
Replied by Ron Kramer on topic guide module (internal)
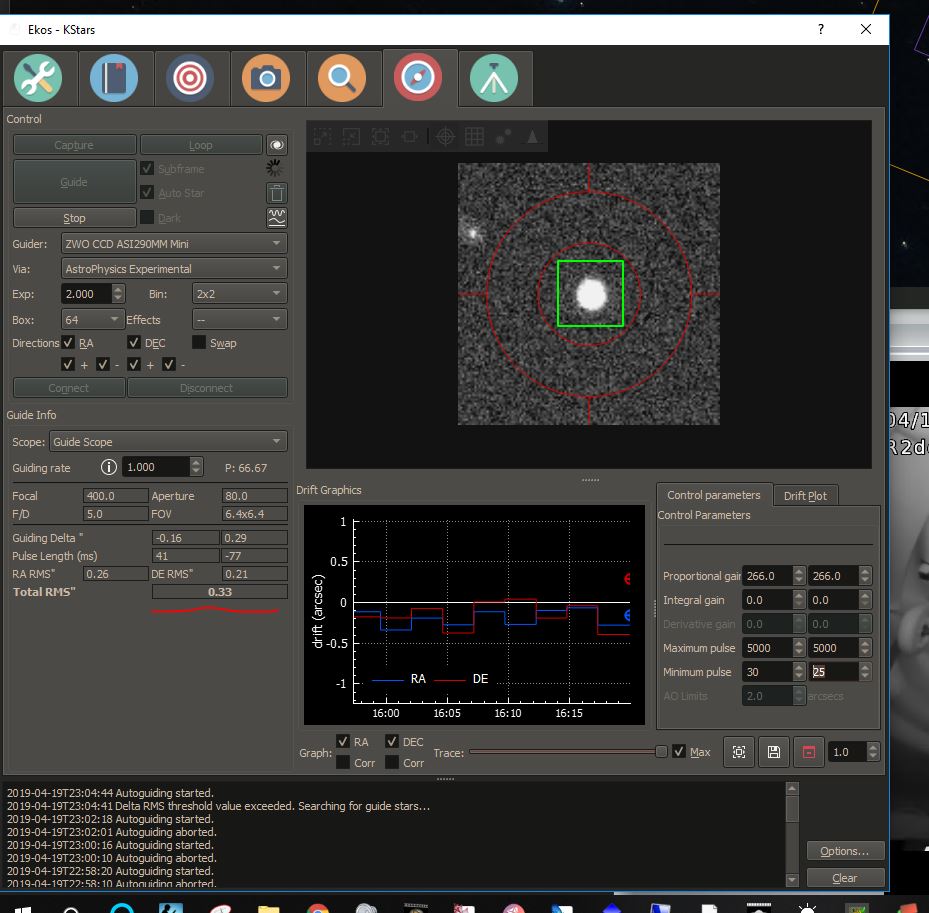
It's been in the .3's for the past 1/2 hour.
EXP SCI - ED152cf APO - Celestron 11" RASA - Stellarvue 80mm
Baader F2 HS NB filters, Lodestar X2 guide camera / OAG - ZWO 290mm mini
ZWO ASI1600MM Pro / ASI174M (solar) / ASI094MC
NEXDome, CLoudwatcher, AVX mount/ASIair and Stellarmate
Please Log in or Create an account to join the conversation.