INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
For those with focus issues
Replied by Frank on topic For those with focus issues
Thank you for your work !
Frank
Please Log in or Create an account to join the conversation.
- Peter Sütterlin
-

- Offline
- Supernova Explorer
-

- Posts: 1009
- Thank you received: 133
Replied by Peter Sütterlin on topic For those with focus issues
imaging went so-so. Seeing was horrible (for my site), but I got almost 6 hours on LDN1584. Will have to see.
Yes, that is what I sugested. As Chris wrote, it is one standard way of handling backlash in absolute position units:
It has the advantage that any value larger than the actual backlash will give you correct performance (maybe at the price of moving too much). This is however different from the BL handling within the focus units themselves. They usually move the additional amount if the direction is changed, and then change the reported position. This one only works correct if the amount you specify is exactly the BL. So IMO it is even superior to the driver-supplied BL.
In principle it's something that should be in the general focus module, a radio button to activate the always-end-with-inward-movement behavior, and an amount for the overdrive (because that can largely vary depending on the focuser). (I had tried to change the focus movement code to implement this, but I don't speak C++ and gave up quickly
 )
)I'll have a look. Maybe it's easier to test/modify in the focus module
While you're right in principle, with a large BL that can get extremely unhandy for the refinement steps, even more if you still take measurements at each of those positions. That is why I'd prefer to have this as a separate configuration option. And ideally (as pointed out above) not even in (your) focus module, but in the general focus driver - then all focus algorithms will benefit.
Yes indeed, it did. It's not a desirable thing, as you point out. I might try to look at that again - but maybe you can also investigate how to implement that correction type in the general focuser class?
Please Log in or Create an account to join the conversation.
- Chris Rowland
-
- Offline
- Platinum Member
-
- Posts: 554
- Thank you received: 138
Replied by Chris Rowland on topic For those with focus issues
Doing it as you describe will be a nightmare for the user because it depends critically on the user setting the backlash parameters exactly right and the hardware retaining that backlash value regardless of position and temperature changes.
Yes, in principle but I have a bad feeling about this, it could get far more complex than it appears. The code for a single focuser isn't complex and can be tailored to that exact focuser hardware.
Feel free to prove me wrong though!
Chris
Please Log in or Create an account to join the conversation.
- Peter Sütterlin
-
- Offline
- Supernova Explorer
-
- Posts: 1009
- Thank you received: 133
Replied by Peter Sütterlin on topic For those with focus issues
Good to know!
Indeed, but (unfortunately) it seems to be how units like the DMFC or the ZWO EAF do it (in firmware, I assume). They do the correction both ways, and (just) add the BL without counting it. The method you describe would only do compensation when moving out, no? And of course you can see the movement of the motor.
Well, you (obviously) have (a lot more) experience there, so I'll trust you
")
But it means you only get it for drivers that actually implement it. So in my case, I would prefer setting the driver-internal BL compensation to zero and use such a global end-inwards mode....
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
 Topic Author
Topic Author
- Away
- Administrator
-

- Posts: 1222
- Thank you received: 565
Replied by Hy Murveit on topic For those with focus issues
Here's my reaction/interpretation of this conversation. I'm flexible, and of course want to implement the algorithm as best as possible. However, I'm being conservative, and until we prove we have an improved algorithm, I'm trying not to change the existing focus behavior (e.g. if you select the iterative or Polynomial algorithms, things will still work as they were). Those algorithms move in both directions. I intended for the Linear algorithm to just move in.
So, when I get a chance, I'll make a change to Linear, where, at the start of the 1st and 2nd passes, it will move out N+M, not take any exposure, and then move back in by M and start the exposure sequence. I'll set M at, say 5 steps. I don't think Peter's concern that a large M might affect refinement steps, because this is just applicable to the start of the two passes, which are not refinement moves. The half-step inward moves during the 2nd pass are my only refinement moves at this point, and they are all moving in after this backlash-removal moving is done. Hopefully the current change, and this modification, will improve things enough so that folks can test out the in-only "Linear" auto-focus algorithm, and demonstrate improvement over the previous algorithms.
I'm sure I can implement the above "N+M change", but I checked and it isn't a trivial mod (it may be small in number of lines, but not trivial in getting it right) so I want to do it carefully,
Let me know if this plan is OK,
Hy
PS Out of curiosity, I've read from Jasem, and Frank above, that this change should especially help SCT owners. Why is that? What is it about SCTs that is different than, say, refractors with respect to auto-focus?
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Away
- Administrator
-
- Posts: 1222
- Thank you received: 565
Replied by Hy Murveit on topic For those with focus issues
Please Log in or Create an account to join the conversation.
- Chris Rowland
-
- Offline
- Platinum Member
-
- Posts: 554
- Thank you received: 138
Replied by Chris Rowland on topic For those with focus issues
Having backlsh can't do any harm and I'd be inclined to implement it independently for all focus methods. I'd have a signed value where the sign controls the direction in which backlash is done and the user can set the amount, zero would be no backlash. I wouldn't have a separate switch. This is too radical for now though.
i've been looking at implementing backlash in the base indifocuser.cpp and the difficulty is that many focusers check that the move has finished in a timer and then do something like this:
FocusAbsPosNP.s = IPS_OK;
FocusRelPosNP.s = IPS_OK;
IDSetNumber(&FocusAbsPosNP, nullptr);
IDSetNumber(&FocusRelPosNP, nullptr);
LOG_INFO("Focuser reached requested position.");
IDSetNumber goes directoy to indibase. Can indifocuser.cpp intercept the IDSetNumber call so it can start the second move?
Chris
Please Log in or Create an account to join the conversation.
Replied by Frank on topic For those with focus issues
as Chris said, my Celestron can have BL but especially the problem of the flip mirror when you change direction for focusing. This is the reason why I can not do autofocus, but maybe I do it wrong especially over the duration of the subs?
Merry Christmas to all !
Frank
Please Log in or Create an account to join the conversation.
- Peter Sütterlin
-
- Offline
- Supernova Explorer
-
- Posts: 1009
- Thank you received: 133
Replied by Peter Sütterlin on topic For those with focus issues
")
I'm having clouds (of course - it's New Moon....
 ), but tomorrow night is predicted clear. I'll try the changed routine then and report back.
), but tomorrow night is predicted clear. I'll try the changed routine then and report back.Chris: Yes, I agree BL compensation should eventually work independent of the focus algorithm (and, as I mentioned, probably also independent of the driver). One reason for that IMO is that the concept of 'outward' and 'inward' is really only known to EKOS (or am I completely wrong there?). But for now, the linear algorithm is a perfect test bed to check the best implementation. And getting it in the device independent part has several traps (like what to do with a driver-internal BL compensation? Should it be switched off when end-inwards is active?). So it's good to have one algorithm that uses it already now...
Please Log in or Create an account to join the conversation.
- Peter Sütterlin
-
- Offline
- Supernova Explorer
-
- Posts: 1009
- Thank you received: 133
Replied by Peter Sütterlin on topic For those with focus issues
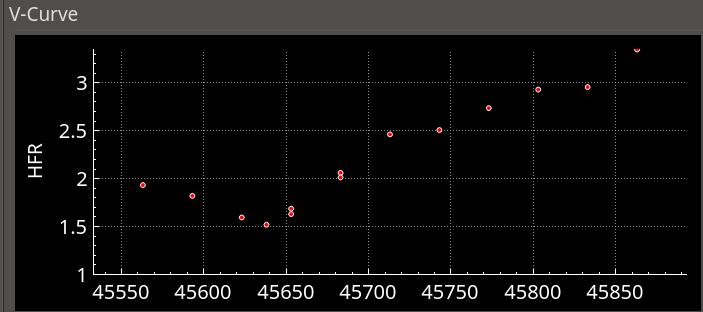
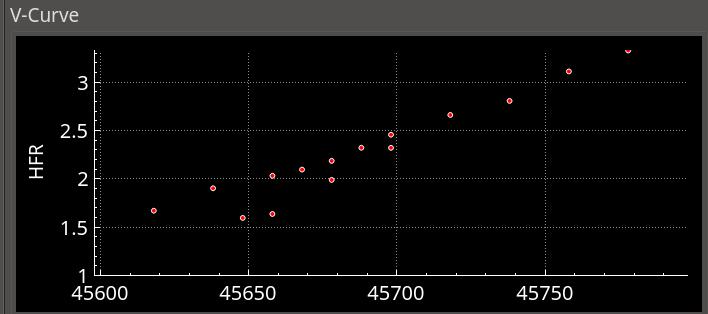
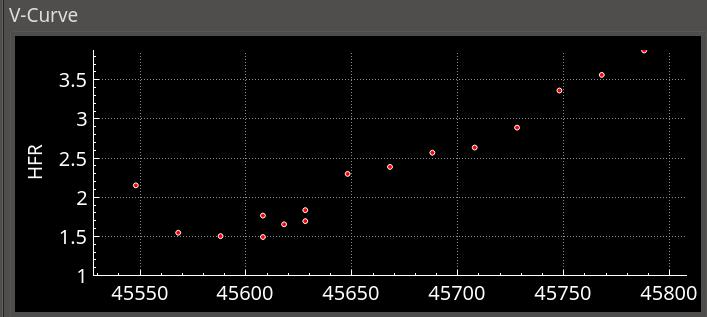
Just playing with the new version. The plateaus are now gone, that's very nice. Attached are three runs, the first with a step of 30, the second and third with 20.
The derived focus positions were 45638 (step30), 45648 (step20 1) and 45608 (step20 2). That the last one is lower for sure is a (real) temperature effect, it's currently dropping at 2 degrees/hour. So that's nothing to worry about.
But the stop criterion is still a bit sharp - it will largely be affected by seeing. Especially the second and third run got a good frame and stopped, both times I'd say a bit too early. Not sure though how to catch that other than doing a polynomial fit including all points after also the fine scan went (clearly) through the minimum. The latter might suggest to wait even one exposure longer for both repeats to make sure it wasn't seeing bending it up (I think this happened in the second scan). And in that scenario it would also need a final move-out and then back in to the detected focus.
But the general shape of the curves looks promising to me

Cheers,
Pit
Please Log in or Create an account to join the conversation.
- Jose Corazon
-

- Offline
- Supernova Explorer
-
- Posts: 1119
- Thank you received: 182
Replied by Jose Corazon on topic For those with focus issues
I am using a self-built, timed DC motor driven autofocuser. This is my decidedly low-tech solution how I overcame the friction/focus shift/slippage problem.
A couple of rubber bands:

Please Log in or Create an account to join the conversation.
Replied by S on topic For those with focus issues
I now tried this, and I seem to just get an long loops of moving in's and moving out's with the same step until it finally reports an error. I also have to set the Initial step size quite low to not get errors like this
[2020-01-19T19:09:49.966 CET DEBG ][ org.kde.kstars.indi] - FCUSB1 Focuser : "Error: Invalid range for FOCUS_TIMER_VALUE. Valid range is from 0 to 5000. Requested value is 20000 "
[2020-01-19T19:09:52.093 CET DEBG ][ org.kde.kstars.indi] - FCUSB1 Focuser : "Error: Invalid range for FOCUS_TIMER_VALUE. Valid range is from 0 to 5000. Requested value is 10000 "
[2020-01-19T19:09:58.382 CET WARN ][ org.kde.kstars.ekos.focus] - Focus GSL error: invalid argument supplied by user
The last line persists even with a small initial step size.
I use a FCUSB focuser.
Best Regards,
Søren
Please Log in or Create an account to join the conversation.