×
INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
~
- Ron Clanton
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 225
- Thank you received: 16
All is well... except auto-focusing on occasion was created by Ron Clanton
I first want to express my thanks to all who are involved with the StellarMate/KStars/EKOS/INDI technology. The current StellarMate 1.61 version has been rock solid on my two mounts. I haven't had a crash or abort of any kind since I upgraded. Well done!
The one "fly in the ointment" for me is auto-focus. I continue to use polynomial, but the results have been inconsistent. For instance, last night it focused perfectly on the initial operation, but focused badly for the next three through the night. Unfortunately, it wasted a great above average seeing night. Bummer.
I'm not sure what is happening... It's like it is focusing on different objects (spots?) at each iteration and gets misled into thinking the focus is better (I use darks). I'm sure that backlash is also contributing to the problem, but I've worked carefully to get the best number to use. Bottom line... I'm going to abandon polynomial focusing in the short term and go back to linear.
So... I could use some recommendations and/or best practices for linear focusing. I'm using a 80mm refractor with an ASI EAF focuser. My focal setting is usually around 14,900 with my ASI183MC Pro. What are good settings for the "Mechanics" tab, particularly Initial Step Size and "Out Step Multiple"?
Thanks!
Ron
The one "fly in the ointment" for me is auto-focus. I continue to use polynomial, but the results have been inconsistent. For instance, last night it focused perfectly on the initial operation, but focused badly for the next three through the night. Unfortunately, it wasted a great above average seeing night. Bummer.
I'm not sure what is happening... It's like it is focusing on different objects (spots?) at each iteration and gets misled into thinking the focus is better (I use darks). I'm sure that backlash is also contributing to the problem, but I've worked carefully to get the best number to use. Bottom line... I'm going to abandon polynomial focusing in the short term and go back to linear.
So... I could use some recommendations and/or best practices for linear focusing. I'm using a 80mm refractor with an ASI EAF focuser. My focal setting is usually around 14,900 with my ASI183MC Pro. What are good settings for the "Mechanics" tab, particularly Initial Step Size and "Out Step Multiple"?
Thanks!
Ron
2 years 4 months ago
#78219
Please Log in or Create an account to join the conversation.
- Hy Murveit
-

- Away
- Administrator
-

- Posts: 1222
- Thank you received: 565
Replied by Hy Murveit on topic All is well... except auto-focusing on occasion
Ron,
I designed Linear to help with focusers with backlash (probably most focusers have that). It isn't as fast as polynomial, but is more tolerant to backlash.
The key parameter for you is probably step size, which is totally dependent on the motorized focus hardware you're using.
I'm attaching below the parameters I use for my refractor, but, really they depend on the fact that I'm using a f/5.6 105mm refractor with a moonlight v2 focuser.
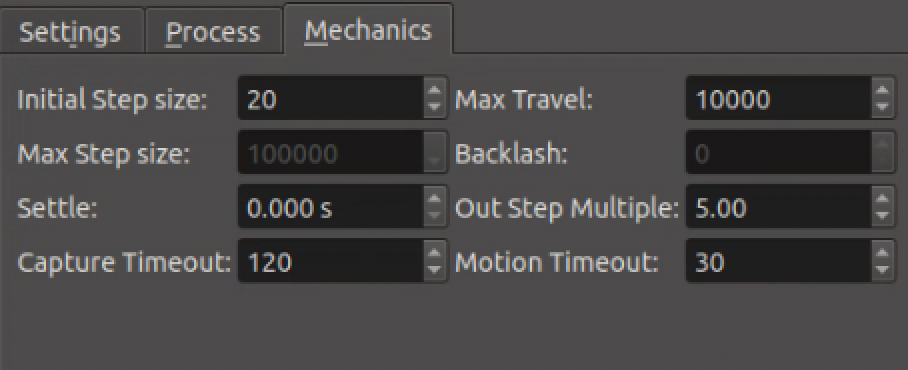

The step size parameter is important to get in the right ballpark, but don't sweat the difference between 20 and 18, or something of that nature.
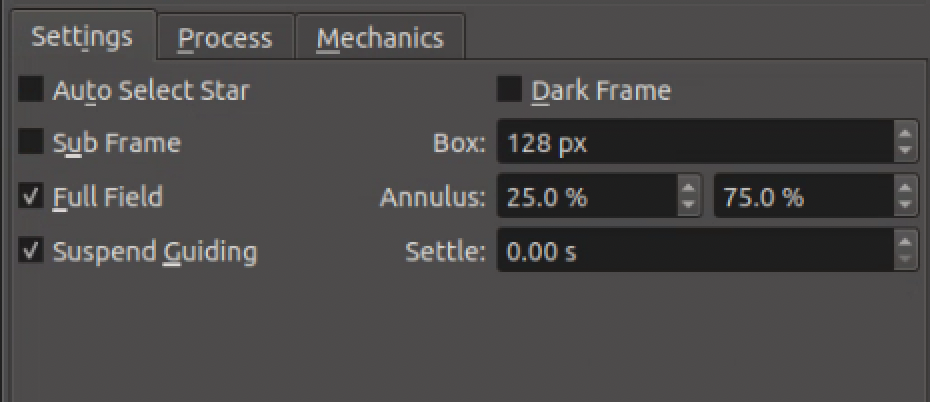
The other parameter is important is tolerance. For me, too tight a tolerance can be problematic, as seeing or whatever can introduce noise into the focus measurements. I use 10%, you can experiment with 5% too, but I'd stay away from very tight tolerances.
I like full-field with an annulus to reduce the HFR noise, but I don't bother with multiple samples.
I use SEP for the star detection. If you don't see reasonable star-detection, you need to play with the SEP profile.
Bottom line, to find a decent step-size parameter, set your system to pretty well focused, then start the Linear algorithm. It will move outside focus and start stepping inward. You want to see a reasonable sampling size. Perhaps each sample gives a small improvement or degradation as it moves near the optimal focus. You don't want to see large jumps near the focus point (too large a step size), and you don't want to see several samples with the same focus (too small a step size). You will see a second inward pass after the system establishes a v-curve where your original step size is halved, and finally some fine-tuning for the final focus at the end once the solution is pending.
Hy
I designed Linear to help with focusers with backlash (probably most focusers have that). It isn't as fast as polynomial, but is more tolerant to backlash.
The key parameter for you is probably step size, which is totally dependent on the motorized focus hardware you're using.
I'm attaching below the parameters I use for my refractor, but, really they depend on the fact that I'm using a f/5.6 105mm refractor with a moonlight v2 focuser.
The step size parameter is important to get in the right ballpark, but don't sweat the difference between 20 and 18, or something of that nature.
The other parameter is important is tolerance. For me, too tight a tolerance can be problematic, as seeing or whatever can introduce noise into the focus measurements. I use 10%, you can experiment with 5% too, but I'd stay away from very tight tolerances.
I like full-field with an annulus to reduce the HFR noise, but I don't bother with multiple samples.
I use SEP for the star detection. If you don't see reasonable star-detection, you need to play with the SEP profile.
Bottom line, to find a decent step-size parameter, set your system to pretty well focused, then start the Linear algorithm. It will move outside focus and start stepping inward. You want to see a reasonable sampling size. Perhaps each sample gives a small improvement or degradation as it moves near the optimal focus. You don't want to see large jumps near the focus point (too large a step size), and you don't want to see several samples with the same focus (too small a step size). You will see a second inward pass after the system establishes a v-curve where your original step size is halved, and finally some fine-tuning for the final focus at the end once the solution is pending.
Hy
The following user(s) said Thank You: Ron Clanton, Rafael Schlegel
2 years 4 months ago
#78223
Attachments:
Please Log in or Create an account to join the conversation.
- Ron Clanton
-
Topic Author
- Offline
- Elite Member
-
- Posts: 225
- Thank you received: 16
Replied by Ron Clanton on topic All is well... except auto-focusing on occasion
Hy,
Thanks! Very helpful.
A couple of questions:
Ron
Thanks! Very helpful.
A couple of questions:
- What is the percent tolerance measuring? Is it the percent difference in the final HFR from the best HFR?
- Why do you use "Small Sized Stars" in the SEP Profile?
- Also, noticed that you didn't check "dark". Wouldn't darks help?
Ron
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Away
- Administrator
-
- Posts: 1222
- Thank you received: 565
Replied by Hy Murveit on topic All is well... except auto-focusing on occasion
1) The first pass finds a v-curve with a "best HFR" at the minimum. The 2nd pass is successful if it finds a position within tolerance of that minimum. E.g. if the min HFR is 1.0, and tolerance is 10%, then it will accept an HFR of 1.1 or less as a solution, though if the HFR is falling during the 2nd pass, it will continue to sample and move in until the HFR stops falling.
2) Don't recall how I wound up with that profile. I guess I tried the different ones and saw which seemed to detect stars the best. Again, I don't think one needs to optimize too much, just make sure that star detection is decent. I may have adjusted some of the parameters in the profiles.
3) I haven't experimented with darks yet. No good reason why not, but I believe my focus is working reasonably well without them.
Hy
2) Don't recall how I wound up with that profile. I guess I tried the different ones and saw which seemed to detect stars the best. Again, I don't think one needs to optimize too much, just make sure that star detection is decent. I may have adjusted some of the parameters in the profiles.
3) I haven't experimented with darks yet. No good reason why not, but I believe my focus is working reasonably well without them.
Hy
The following user(s) said Thank You: Ron Clanton
Please Log in or Create an account to join the conversation.
- Ron Clanton
-
Topic Author
- Offline
- Elite Member
-
- Posts: 225
- Thank you received: 16
Replied by Ron Clanton on topic All is well... except auto-focusing on occasion
Thanks!
Ron
Ron
2 years 4 months ago
#78229
Please Log in or Create an account to join the conversation.

Replied by Doug S on topic All is well... except auto-focusing on occasion
Hi Ron, Hy's given you what amounts to some coarse rules of thumb. If you are interested in precision (to avoid wasted time), I suggest you become familiar with and calculate your critical focus zone size, and measure your focuser drawtube travel. The 3rd important variable is your motor counts per revolution (focuser motor). You don't want to set a step size larger than the CFZ (otherwise, you'll just jump over best focus). Too small and you'll waste time walking through several measurements in the same CFZ.
The CFZ topic and calculation (don't be scared by the math...it's easy enough) are covered here:
www.goldastro.com/goldfocus/ncfz.php
Some minor time spent reading another related topic can help too (starting at the link):
indilib.org/forum/ekos/8963-question-abo...e.html?start=0#68078
You'll then be in position to set that step size properly and with confidence that your V curve will be sized right. In an ideal world, the step size setting should be automatic (based on other system parameters), but it's not too hard to set manually. You'll also have a better handle on how seeing affects needed precision.
Good luck and happy readings, Doug
The CFZ topic and calculation (don't be scared by the math...it's easy enough) are covered here:
www.goldastro.com/goldfocus/ncfz.php
Some minor time spent reading another related topic can help too (starting at the link):
indilib.org/forum/ekos/8963-question-abo...e.html?start=0#68078
You'll then be in position to set that step size properly and with confidence that your V curve will be sized right. In an ideal world, the step size setting should be automatic (based on other system parameters), but it's not too hard to set manually. You'll also have a better handle on how seeing affects needed precision.
Good luck and happy readings, Doug
The following user(s) said Thank You: Ron Clanton
2 years 4 months ago
#78233
Please Log in or Create an account to join the conversation.
- Ron Clanton
-
Topic Author
- Offline
- Elite Member
-
- Posts: 225
- Thank you received: 16
Replied by Ron Clanton on topic All is well... except auto-focusing on occasion
Doug,
Okay... I think I understand the concept of NCFZ. I'll get the calculator out and give it a whirl! Man, this is cool stuff! So... just a couple of questions:
Ron
Okay... I think I understand the concept of NCFZ. I'll get the calculator out and give it a whirl! Man, this is cool stuff! So... just a couple of questions:
- Once I have calculated the NCFZ and translated that length into EAF focus clicks, what step size should I put into EKOS? For example, if the NCFZ calculates to 100 steps... would you use 50?
- I understand the concept of seeing limits, but how/where do I get that measurement for a particularly night?
- Since seeing is a variable, do you change your step size every night?
Ron
2 years 4 months ago
#78235
Please Log in or Create an account to join the conversation.
Replied by Doug S on topic All is well... except auto-focusing on occasion
Yes, a 1/2 size setting should do the trick pretty well. On very rare occasion, you might land at the extreme edge of the CFZ, so if you wanted to short that 1/2 by a tad, that would give a bit of insurance that you're always going to be in the zone.
Seeing is often estimated by double star separations (visual observers do this regularly). You can get a coarse feel for seeing over time by watching HFR floor values during focus runs too.
Generally, I don't change my step size. I know my site, and it's nominal seeing spread. I factor the step size for good/very good conditions, leave it there, and accept that the "actual" CFZ for a lesser seeing condition will be larger. I accept some wasted measurements in those conditions (while praying for seeing to improve!)")
Seeing is often estimated by double star separations (visual observers do this regularly). You can get a coarse feel for seeing over time by watching HFR floor values during focus runs too.
Generally, I don't change my step size. I know my site, and it's nominal seeing spread. I factor the step size for good/very good conditions, leave it there, and accept that the "actual" CFZ for a lesser seeing condition will be larger. I accept some wasted measurements in those conditions (while praying for seeing to improve!)
The following user(s) said Thank You: Ron Clanton
2 years 4 months ago
#78240
Please Log in or Create an account to join the conversation.
- Ron Clanton
-
Topic Author
- Offline
- Elite Member
-
- Posts: 225
- Thank you received: 16
Replied by Ron Clanton on topic All is well... except auto-focusing on occasion
Doug,
Okay... I'm working on getting all the information/measurements to calculate the CFZ for my setups. However, I'm having difficulty finding an estimate of "seeing" for various conditions. I use Astrospheric to monitor and predict conditions in my area. Is there a rough equivalent for their ratings of excellent, good, average, etc. to seeing arc-seconds? I read some articles about measuring double stars... but wow. I've looked for other sources on how to estimate the seeing in arc-seconds, but am not coming up with anything.
Thanks,
Ron
Okay... I'm working on getting all the information/measurements to calculate the CFZ for my setups. However, I'm having difficulty finding an estimate of "seeing" for various conditions. I use Astrospheric to monitor and predict conditions in my area. Is there a rough equivalent for their ratings of excellent, good, average, etc. to seeing arc-seconds? I read some articles about measuring double stars... but wow. I've looked for other sources on how to estimate the seeing in arc-seconds, but am not coming up with anything.
Thanks,
Ron
2 years 4 months ago
#78268
Please Log in or Create an account to join the conversation.
Hi Ron, no need to spend too much time on the seeing issue. Unless you live on a mountain top, you won't experience 1 arcsecond seeing very often (and possibly never). Most amateur sites are in the 1.5 (best) to 3 (or worse) arcsec seeing regime. If you set up CFZ for ~2 arcsecs seeing, you'll be fine with that 1/2 mark discussed previously. Then, if by chance you get lucky and get 1.5 arcsecs or better on that rare occasion, you're still likely to be fine. Hope that helps, Doug
The following user(s) said Thank You: Ron Clanton
2 years 4 months ago
#78270
Please Log in or Create an account to join the conversation.
- Ron Clanton
-
Topic Author
- Offline
- Elite Member
-
- Posts: 225
- Thank you received: 16
Replied by Ron Clanton on topic ~
Thanks!
2 years 4 months ago
#78284
Please Log in or Create an account to join the conversation.
Time to create page: 0.248 seconds
© 2003-2022 by INDI Library. All rights reserved.