I agree, these expensive mounts should have ways to keep them from being damaged.
D'oh! Well that makes sense.
Regarding "park" I guess the negative I can think of is what I've experienced with mine, that being:
since "Park" is a prominent option, i.e. a button for it exists in more than one location... if you can't set up some mounts to park, then the existence of the button is worse than useless because accidentally pressing it sends the mount moving to some position (which seems random on my mount).
In my case, that "random" position has, 50% of the time, been such that it will crash the mount unless I intervene to stop it. Obviously, if a guy wanted to set up his rig to remotely control it, then an accidental sending of a "park" command is a significant problem.
If some mounts can't "park", then maybe having an option to select whether or not you want the buttons to be present at all on the controller screens or not would be a good thing? In the case of these types of mounts, at best it's a dead button, at worst accidental pressing of a button you can never use but is always present can possibly damage a mount.
In other words, in my case (and others), since my mount apparently can't park at all, if I could make the button disappear altogether on the control screens (or be grayed out and non-functional or whatever), then that could very well protect a guy's equipment from being damaged. Seems like a pretty good idea.
Looking at the iOptronv3 sources the mount does park. It gets the park altitude and azimuth, converts them to a Ra and Dec, slews to that position, then stops tracking. That should be pretty reproducible in terms of the direction the mount is looking but the side of the pier the mount ends up on may vary if it's close to the meridian.
I suggest moving the mount to the position you want it to park and setting the park position to the current position. Then save the settings. That shoud make parking more predictable.
×
INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Noob question(s) - Initial setup - limits to avoid mount collision

Hi. Apologies if this is too noob to be appropriate here, but seems like it might be an important thing to focus on for getting started, i.e. not "crashing" your mount is probably a good idea right at the beginning.
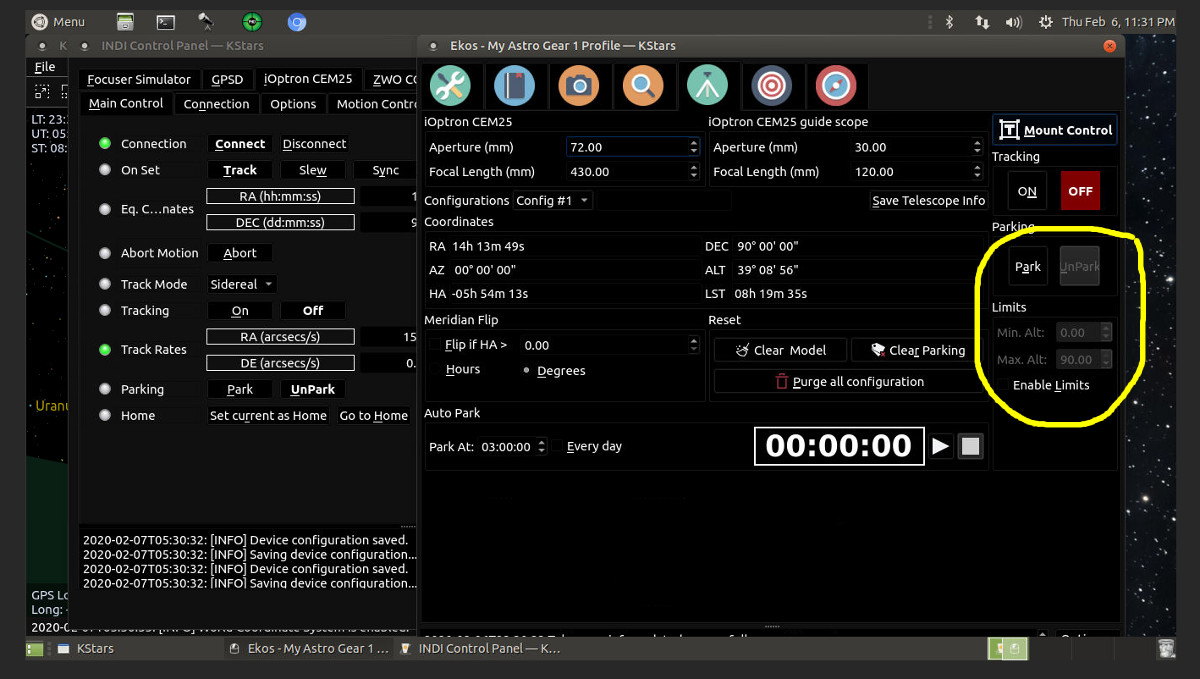
I see a parameter for setting a limit so you don't crash your drive, but it's not intuitive I guess because I can't figure out what numbers should be entered. There are a lot of coordinate possibilities on that same page, but none of them correspond to the "Min Alt." or "Max Alt." values that show on the page. Or at least it's not connecting in my mind. They are hours & minutes instead of degrees to start with, so I don't think I'm looking in the correct place.
I figure I'd want to set the home position to essentially where the telescope points at the CP and the scope/weight axis vertical so I did that first. Then I swung the mount to either side close to where I want the limit to be and wrote down all the coordinate values from the left side of the mount tab. The HA is the only thing that changes but the numbers don't make sense to me. Can anybody help me here?
Kind of related but maybe on a tangent, I'd like the "Park" position to just be the same as the home position and I set that to happen once, but I was just poking at it and it was a bit of an accident really. But every time I restart the Pi, the park position is somewhere completely else and clicking "Park" always moves the telescope around such that I have to manually abort otherwise it will crash the mount into the base, which is kind of the exact opposite of what I'd want "Park" to do.
Anyways, getting this set up to control my mount remotely without the fear that it could crash and start stripping gears seems like an important first step I'd like to safely configure really early in the process. I seem to be getting nowhere with it, so any guidance would be appreciated.
I've attached a pic of the screen I'm thinking I need to set this. Maybe I'm not even in the correct place?
I see a parameter for setting a limit so you don't crash your drive, but it's not intuitive I guess because I can't figure out what numbers should be entered. There are a lot of coordinate possibilities on that same page, but none of them correspond to the "Min Alt." or "Max Alt." values that show on the page. Or at least it's not connecting in my mind. They are hours & minutes instead of degrees to start with, so I don't think I'm looking in the correct place.
I figure I'd want to set the home position to essentially where the telescope points at the CP and the scope/weight axis vertical so I did that first. Then I swung the mount to either side close to where I want the limit to be and wrote down all the coordinate values from the left side of the mount tab. The HA is the only thing that changes but the numbers don't make sense to me. Can anybody help me here?
Kind of related but maybe on a tangent, I'd like the "Park" position to just be the same as the home position and I set that to happen once, but I was just poking at it and it was a bit of an accident really. But every time I restart the Pi, the park position is somewhere completely else and clicking "Park" always moves the telescope around such that I have to manually abort otherwise it will crash the mount into the base, which is kind of the exact opposite of what I'd want "Park" to do.
Anyways, getting this set up to control my mount remotely without the fear that it could crash and start stripping gears seems like an important first step I'd like to safely configure really early in the process. I seem to be getting nowhere with it, so any guidance would be appreciated.
I've attached a pic of the screen I'm thinking I need to set this. Maybe I'm not even in the correct place?
4 years 2 months ago
#49137
Please Log in or Create an account to join the conversation.
- Gonzothegreat
-

- Offline
- Moderator
-

- Posts: 2255
- Thank you received: 223
Replied by Gonzothegreat on topic Noob question(s) - Initial setup - limits to avoid mount collision
Hello,
I don't use this option, however I believe this is to allow your mount to be used from 0 degree to Zenith (90 deg) only. But I could be 100% wrong on this.
What you're looking for really are the Horizon Limits, where you can really set a zone where you telescope is allowed to operate.
indilib.org/devices/mounts/eqmod.html (bottom of page)
Last time I used it, it wasn't intuitive...
I don't use this option, however I believe this is to allow your mount to be used from 0 degree to Zenith (90 deg) only. But I could be 100% wrong on this.
What you're looking for really are the Horizon Limits, where you can really set a zone where you telescope is allowed to operate.
indilib.org/devices/mounts/eqmod.html (bottom of page)
Last time I used it, it wasn't intuitive...
4 years 2 months ago
#49545
Please Log in or Create an account to join the conversation.

Replied by Brian on topic Noob question(s) - Initial setup - limits to avoid mount collision
I can't help you with the limit positions, I have also been confused by what they mean. I've never set them because I have my meridian flip set to happen a bit past meridian and the max altitude limit setting only goes to 90 degrees I'm afraid no meridian flip would happen. I should try this indoors now that you have reminded me of the situation. Having the limits would be nice to save having a crash.
As for the park position, there is none in the CEM25P. I tried setting one in Ekos when I first got the mount but got nowhere... searching revealed others have the same problem . I don't really see a downside to not having a park position , I just set the home position to be pointing at the NCP and that is where I "park" it.
Hopefully someone can explain the limits.
As for the park position, there is none in the CEM25P. I tried setting one in Ekos when I first got the mount but got nowhere... searching revealed others have the same problem . I don't really see a downside to not having a park position , I just set the home position to be pointing at the NCP and that is where I "park" it.
Hopefully someone can explain the limits.
4 years 2 months ago
#49559
Please Log in or Create an account to join the conversation.
- David Tate
-

- Offline
- Elite Member
-

- Posts: 309
- Thank you received: 40
Replied by David Tate on topic Noob question(s) - Initial setup - limits to avoid mount collision
I'd like to be able to use only one of them... 0 degrees. It would help keep the scope from travelling past the horizon.
I wouldn't even mind being able to set it at a given degree... say 10 degrees.
I wouldn't even mind being able to set it at a given degree... say 10 degrees.
4 years 2 months ago
#49560
Please Log in or Create an account to join the conversation.
- Chris Rowland
-

- Offline
- Platinum Member
-

- Posts: 554
- Thank you received: 138
Replied by Chris Rowland on topic Noob question(s) - Initial setup - limits to avoid mount collision
The limits being talked about here are altitude limits. I've no idea how well they work but the thing to do is try them with your mount. If you only want a low limit then set the upper limit to 90. Set them up and try various ways to move the mount past the limit.
The other limits which would be useful are limits to the movement of a GEM which stop it moving too far past the meridian and running into the mount. These are not implemented but there's been talk that they will. I don't need to worry about these because I have a Celestron GEM and they have software limits where they should be - in the motor controller.
The other limits which would be useful are limits to the movement of a GEM which stop it moving too far past the meridian and running into the mount. These are not implemented but there's been talk that they will. I don't need to worry about these because I have a Celestron GEM and they have software limits where they should be - in the motor controller.
The following user(s) said Thank You: Vince
4 years 2 months ago
#49566
Please Log in or Create an account to join the conversation.
- David Tate
-
- Offline
- Elite Member
-
- Posts: 309
- Thank you received: 40
Replied by David Tate on topic Noob question(s) - Initial setup - limits to avoid mount collision
I agree, these expensive mounts should have ways to keep them from being damaged.
4 years 2 months ago
#49586
Please Log in or Create an account to join the conversation.
Replied by Vince on topic Noob question(s) - Initial setup - limits to avoid mount collision
D'oh! Well that makes sense.
Regarding "park" I guess the negative I can think of is what I've experienced with mine, that being:
since "Park" is a prominent option, i.e. a button for it exists in more than one location... if you can't set up some mounts to park, then the existence of the button is worse than useless because accidentally pressing it sends the mount moving to some position (which seems random on my mount).
In my case, that "random" position has, 50% of the time, been such that it will crash the mount unless I intervene to stop it. Obviously, if a guy wanted to set up his rig to remotely control it, then an accidental sending of a "park" command is a significant problem.
If some mounts can't "park", then maybe having an option to select whether or not you want the buttons to be present at all on the controller screens or not would be a good thing? In the case of these types of mounts, at best it's a dead button, at worst accidental pressing of a button you can never use but is always present can possibly damage a mount.
In other words, in my case (and others), since my mount apparently can't park at all, if I could make the button disappear altogether on the control screens (or be grayed out and non-functional or whatever), then that could very well protect a guy's equipment from being damaged. Seems like a pretty good idea.
4 years 2 months ago
#49595
Please Log in or Create an account to join the conversation.
Replied by Brian on topic Noob question(s) - Initial setup - limits to avoid mount collision
As mentioned I have an Ioptron CEM25P . In the hand controller under settings there is a setting called "set altitude limit". Mine is set to +05 degrees, I'm not sure if I set that in the past or if it is a default setting. In the Kstars planetarium I chose a star slightly above the 5 degree lower limit on the western horizon and selected goto, then just let it track. Kstars stopped tracking when the altitude reached 5 degrees so I would say at least for the CEM25P the lower handset limit is not violated by Kstars. BTW I had no altitude limits set in Ekos.
4 years 2 months ago
#49597
Please Log in or Create an account to join the conversation.
- Chris Rowland
-
- Offline
- Platinum Member
-
- Posts: 554
- Thank you received: 138
Replied by Chris Rowland on topic Noob question(s) - Initial setup - limits to avoid mount collision
Looking at the iOptronv3 sources the mount does park. It gets the park altitude and azimuth, converts them to a Ra and Dec, slews to that position, then stops tracking. That should be pretty reproducible in terms of the direction the mount is looking but the side of the pier the mount ends up on may vary if it's close to the meridian.
I suggest moving the mount to the position you want it to park and setting the park position to the current position. Then save the settings. That shoud make parking more predictable.
4 years 2 months ago
#49664
Please Log in or Create an account to join the conversation.
Time to create page: 0.841 seconds
© 2003-2022 by INDI Library. All rights reserved.