INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Alt-Az mode for EQmod
Replied by Jean-Luc on topic Alt-Az mode for EQmod
Now the question is what usage for an altaz skywatcher driver (driving AZGti, AZEQ, virtusoso and all other altaz mounts I don't know of) ?
- visual: should be ok, but never heard a report here from users if any;
- planetary imaging: did not test myself, @Dirk tried to do so, but it seems he has serial port communication issues and I can't help him here. I'm not sure you need plate solving for planetary imaging, even 'tracking' is usually performed when you stack the images, but I am not used to planetary imaging;
- deep sky imaging: there you need everything, as you state in your post.
As I already said, I won't add a button in indi-eqmod for alt-az mode: first it's risky for users, and it will actually add a bunch of if/then/else in the code. It is not as simple as adding a layer between alt/az and ra/dec. Tracking would use variable speed adjustments, and you have to compute period values and make timer callbacks at a rate which depends on the stepper resolution of your mount. And you may have zero period sometimes (infiinite speed at zenith or pole, I don't remember), hence what to do there ? In Equatorial mode, tracking is just starting the RA motor... Concerning guiding I don't know if guiding programs may use Alt/Az axes, hopefully they do.
In other words, this represents a huge amount of work, refactoring indi-eqmod code first to split it into eq and altaz mode, refactoring alignment too, and then testing all that new stuff, which is at least half of the work. I still have a pair of pull requests waiting for users to confirm. AzGTi snap port is one of them, on my side I only use simulator mode, put A5 as mount code, see the snap button appear in the control panel and toggle it, but I still don't know if that actually works in real. What I mean is that I need testers, merging a 3 or 6 month branch may be time consuming (or not). And sometimes users simply vanish (that was the case for snap ports in indi-eqmod, I made the work twice).
Thus my point of view is that I don't plan to invest time to develop an altaz driver as there may be other solutions (which may need tweaking, but without testers...). And why not using an equatorial wedge if you want to plate solve? I don't know when does field rotation appear in altaz mode, but plate solving may also fail in altaz mode for that reason, even with a perfect smooth tracking. Or am I wrong ?
Please Log in or Create an account to join the conversation.
- Dirk Tetzlaff
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

- Posts: 91
- Thank you received: 5
Replied by Dirk Tetzlaff on topic Alt-Az mode for EQmod
Regarding the alt-az drivers: I have not been aware, that these drivers implement kind of leapfrog tracking. Probably for the planetary imaging I would be better of to revert to the factory driver running off the handcontroller. Once this is initialised and aligned I can connect with the synscan driver. The only thing which put me off here, is that I first have to do the manual align according to the synscan manual as the driver will not accept any input before conclusion of the initial alignment routine. I would have to install and use the visual guide scope, which I retired already and every time punch in the current date, time & stuff. It sounded so promisingly easy to do all the alignment with with ekos alignment module.
So if there currently is no decent alternative to the factory drivers I would also pitch again for having some form of an alternative for alt-az control. As much as I understand the benefits of GEM mounts, the recent advancements with EAA made many things possible, e.g. live stacking of relatively short exposures, which makes DSO much simpler as one does not necessarely need guiding and even field rotation is not a problem as the image is being de-rotated by software. I happily volunteer for testing !
The big advantage of the alt-az mounts is the time you save when setting things up. You just have to level the base of the mount and are ready to go. Setting up my stuff in GEM config takes considerably more time: in my case I have to go to my backyard as the view of Polaris is obstructed from my terrace. The tripod for my alt-az mount has rollers attached, so I can just roll the entire rig out, level it and start. I am only a casual observer. So when i have lets say three hours for observing during evening hours, I loose 1 hour for mounting and dismounting my equipment and probably 20 min. for proper alignment of the scope. Something always goes wrong, so in the end I have max. 50% of the time for actual observing. With the alt-az I would just roll in and out in 10 minutes and have the scope aligned in 5 min. So effectively the time for observation is doubled. At least in theory...
Anyway, I would very much appreciate to have a system as good as eqmod for the alt-az mount. With the advancments in EAA I would guess that more and more people will use alt-az mounts as they are simpler to use and can bring more people to this fascinating hobby.
Please Log in or Create an account to join the conversation.
Replied by Jean-Luc on topic Alt-Az mode for EQmod
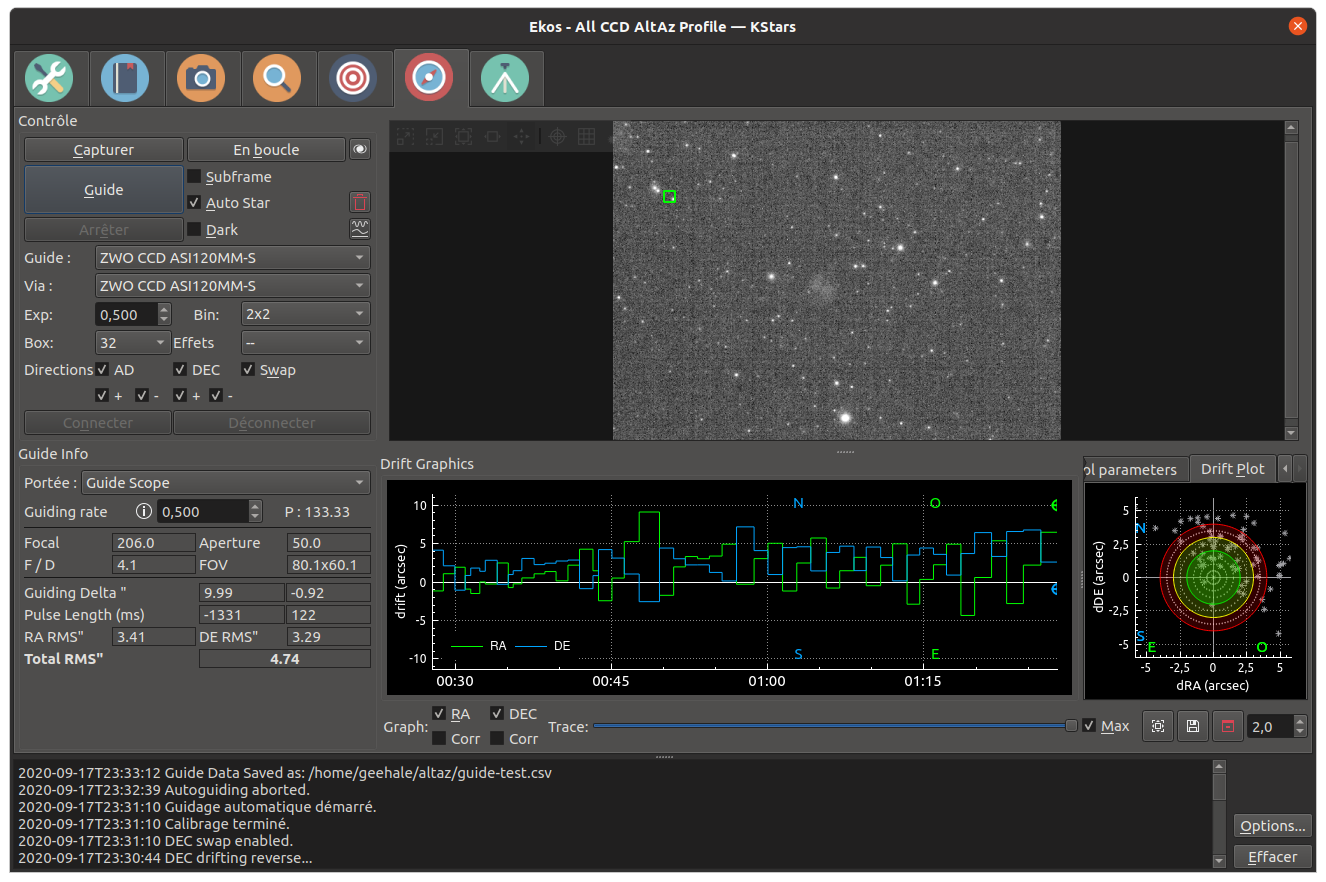
@Federico I made an error in my previous post, after looking at the skywatcherAltAzMount driver code, the current implementation consists in speed adjustments made every seconds. It decided me to test indoor with my AZEQ5 and the CCD simulator. I have been able to track a star, take a shot and sends it to astrometry.net (Capture and Solve). It did not resolve unfortunately, the CCD image having two big circles with no stars inside it, only two or three dozens around, and a double star just in the center (I pointed Arcturus!). I must have missed something. Anyway Ekos did not complain at all with the AZEQ5 while it was tracking, Should have a try on real sky when possible.
I really believe the skywatcherAltAzMount driver is the best option for the moment. And don't understand why you would like I make two drivers in one with indi-eqmod. And don't have plans for that before at least months.
Please Log in or Create an account to join the conversation.
- Federico Parra
-

- Offline
- New Member
-

- Posts: 15
- Thank you received: 1
Replied by Federico Parra on topic Alt-Az mode for EQmod
Jasem mentioned EAA was in the roadmap of Stellarmate. More later, thank you for your response!
Please Log in or Create an account to join the conversation.
- Federico Parra
-
- Offline
- New Member
-
- Posts: 15
- Thank you received: 1
Replied by Federico Parra on topic Alt-Az mode for EQmod
Please Log in or Create an account to join the conversation.
- Dirk Tetzlaff
-
Topic Author
- Offline
- Premium Member
-
- Posts: 91
- Thank you received: 5
Replied by Dirk Tetzlaff on topic Alt-Az mode for EQmod
Just posted within the astroberry section of this forum to Kaczorek, the maker of astroberry. Maybe he has some idea, what the problem is.
What makes me curious is, that the compilation of the official branch of libindi did work, apparently. At least I got a working libindi afterwards. Did I understand you correctly, that it is your assumption that the compilation of libindi does not work on the astroberry ? I have the feeling that I missed something, anybody more knowledgeable with linux would automatically do.
Please Log in or Create an account to join the conversation.
- Federico Parra
-
- Offline
- New Member
-
- Posts: 15
- Thank you received: 1
Replied by Federico Parra on topic Alt-Az mode for EQmod
Field rotation would not disturb pictures with an exposure so short as I was describing above (10-15 seconds)
Please Log in or Create an account to join the conversation.
Replied by Jean-Luc on topic Alt-Az mode for EQmod
Thus I've learned a little more, and your posts also help me to understand what were your concerns and what you would need. As I understand it, alignment is not primordial as long as Capture/Solve/Slew is working, guiding is of no use as your setup does not have a guider, and you only really need a smooth tracking. What I have in mind as a first step is to create a new driver out of the existing indi repos, hence astroberry users may compile it without disturbing their installation. I will derive it from indi-eqmod and/or indi-skywatcherAltAzMount and then concentrate on the tracking feature. I'll keep you informed when that will be initiated and when I will need you to perform tests.
Please Log in or Create an account to join the conversation.
- Federico Parra
-
- Offline
- New Member
-
- Posts: 15
- Thank you received: 1
Replied by Federico Parra on topic Alt-Az mode for EQmod
Please Log in or Create an account to join the conversation.
- Dirk Tetzlaff
-
Topic Author
- Offline
- Premium Member
-
- Posts: 91
- Thank you received: 5
Replied by Dirk Tetzlaff on topic Alt-Az mode for EQmod
Please Log in or Create an account to join the conversation.
- Dirk Tetzlaff
-
Topic Author
- Offline
- Premium Member
-
- Posts: 91
- Thank you received: 5
Replied by Dirk Tetzlaff on topic Alt-Az mode for EQmod
Does this makes sense ?
Please Log in or Create an account to join the conversation.
- Dirk Tetzlaff
-
Topic Author
- Offline
- Premium Member
-
- Posts: 91
- Thank you received: 5
Replied by Dirk Tetzlaff on topic Alt-Az mode for EQmod
This is without guarantee. Just my understanding.
Please Log in or Create an account to join the conversation.