


I got help from my Linuxfriend, he already got the menu to show up. Now it's only the rest to do. But I feel I can get this to work with help from my friend.
Lars
Read More...
Sounds a bit too complicated for me. Is there anyone that can add this menu and custom gear function ? If, then all can have use of it what ever gear ratio there is in the mount. That's how it's in the ASCOM version of EQMOD.
I only managed to make the brutal version and direct in the code add my special gear ratio. But then of no use for any other.
I only have this to work for the Astroberry with 32-bit OS. I'm now looking how to get this to work on the new Pi5 64-bits version. Some changes in EQMOD I can see. Now it use the same gear ratio for both RA and DEC, make it easier.
Maybe something like this:
skywatcher.cpp file, about line 770 to 800
if (custom gear ratio == 0/1) // Only if custom gear ratio is enabled from menu
{
*Steps360 = from menu; // for Belt Drive Custom gear ratio
*StepsWorm = from menu; // for Belt Drive Custom gear include RA drift compensation in older versions
*HighspeedRatio = from menu // maybe not necessary
}
Lars
Read More...
I'm adding custom gear setup for the EQMOD (SkyWatcher). I have got it to work but only with my own unique gear ratio, it's hard coded in the driver. I need a menu to setup the gear ratios so all of you can use this custom gear ratio.
This is where I want to place the menu.
"INDI Control Panel, EQMOD>Mount>Firmaware:
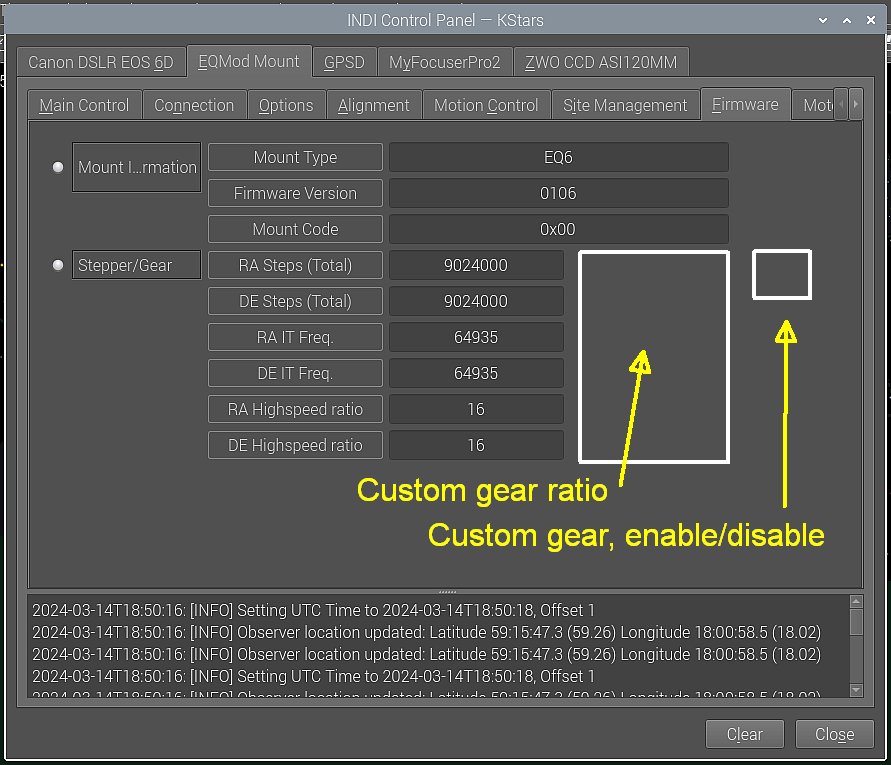
The first problem for me to solve, where do I find the source code for the menu above ? I think it must be one of the KStars files, but which ?
Here is my work with Custom Gear so far:
www.astrofriend.eu/astronomy/projects/pr...ect-indi-driver.html
Lars
Read More...
Maybe I solved the problem with the slow transfer of data from the camera to Raspberry. I setup a new astroserver system with a Raspberry Pi5, this time I chose the 64-bit version. It's not finished yet but when testing the Canon 6D camera it now transfer the image file in 2.9 seconds, much faster than the earlier 9 second.
I have also read the the 32-bit system isn't developed anymore. The Astroberry is based on 32-bit, but a new 64-bit version is in plan I think.
Lars
Read More...
Hi,
Just a short question. The Time Stamp of the photo files, default it's local time, but could it be changed to UT ?
Lars
Read More...

Hi,
I have started to design a filter wheel that I can 3D-print. Not sure if it will work but I have to do a test.
You can follow it here:
www.astrofriend.eu/astronomy/projects/pr...ct-filter-wheel.html
My plan is to use the open source project myFilter Wheel: sourceforge.net/projects/myfilterwheel-ascom-diy/ but could of course use some other. At the moment I don't think there is any INDI driver for it, only ASCOM. When I have finished the hard ware I have to solve this driver problem. Long time ago I read somewhere that there are some templates that can be used when making INDI drivers. But where to find them ?
Lars
Read More...
I setting up a second astrophotography equipment, to make it practical I bought a second camera for auto guiding. It's a used ZWO ASI120mm with the old USB2. It will be used with a Raspberry which use Linux. Bad chosie because it didn't work with Linux and all say it's very complicated to get it to work correctly.
I gave it a try and collected all information from INDI forum and others and got it to work.
Here is my documentation if someone else has the same problem:
www.astrofriend.eu/astronomy/projects/pr...si120mm-upgrade.html
Note, I havn't tested it under a clear sky yet.
Lars
Read More...
Here is latest update of my motor focuser project. Now I'm building the motor focuser controller based on MyFocuserPro2 open source project.
www.astrofriend.eu/astronomy/projects/pr...or-focus-driver.html
Maybe I can do a test the week coming.
Lars
Read More...
My modified EQMOD driver still works fine. I have updated my document of how I edited the driver:
www.astrofriend.eu/astronomy/projects/pr...ect-indi-driver.html
Hope it can be of some help.
Lars
Read More...
Is it possible to sync the clock in a Canon DSLR camera ? It's a Canon 6D. My setup is Astroberry installed on a Raspberry Pi4.
Accoridng to this meny there is something about sync of DSLR camera clock:
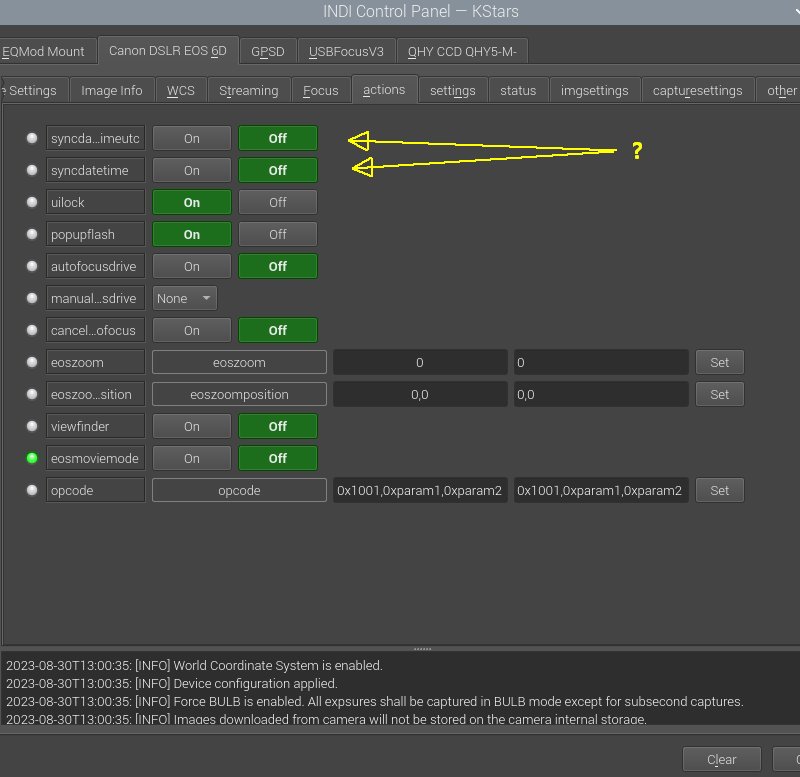
Nothing happen when I enable the sync (ON).
Recently I got the GPS to sync RP's system clock and KStars, even the date and location, used the Chrony. Only the camera's clock left to sync.
/Lars
Read More...
Now we have come to the dark period in Sweden and I can start test the changes I have done.
With help of the Crony time handler I at last got thing to work. I got a lot of help for this, from here and friends. Now I can use the equipment outside the internet range and let the GPS sync the system clock. Earlier it only synched the KStars cloc and it caused some problem when polar align the mount. I have updated my instructions to this new setting, not much is changed, most important was the option "-n" in GPSD. It must be set to have Chrony to work as suppused. This is the normal setting but I had changed it to "" according instructions, but that was for Astroberry before version 2.0.1, from version 2.0.1 Astroberry use Chrony as standard. At least I think this is how it works.
Here is my instructions:
www.astrofriend.eu/astronomy/projects/project-heq5/07-heq5.html
Next problem to solve, how to sync the clock in a DSLR Canon camera. It looks that it's possibly in the Ekos settings. But that I start a new thread for.
Lars
Read More...
Hi Nigel,
Sorry to ask so much, but do you type that command once and after that it always use chrono ? I haven't got it to work yet.
And one more question, does it only set the KStars time and date or does it also correct the Raspberry clock time and date ?
I have now got the KSTars clock and time correct, but it's the offset from the Raspberry clock. Raspberrys clock still wrong and then also the time stamp of the photo files. I don't understand why KStars take the Raspberry clock and not it's own time which is correct.
/Lars
Read More...
Thanks for all information and tricks. I have given up about the Canon 6D, it's too slow. Whatever setting I use, always 9 seconds transfer time.
Looking for a Nikon D800, more pixel and the Sony sensor. But even that camera I expect to have a slow transfer time.
/Lars
Read More...