


The pinout of the 40 pin header is the same, so the hardware is compatible. However, the driver will need to be modified to support the Orange Pi, because every brand of single board computer has a different method of controlling the GPIO pins on the header.
To get it to work would require some back and forth between me and someone who actually owns an Orange Pi (possibly you) doing testing, etc. to get it to work. Overall it's probably a worthwhile endeavor, since the Orange Pi is a popular alternative to Raspberry Pi.
Read More...
Hi Kurt,
I've only ever attached my stepper motor to the fine focus shaft, never the course focus, so I don't have any direct experience. But I know some people use stepper motors with built-in reduction gearing, and attach to the course focus shaft. The gearing will add some backlash, but at least some of the autofocus algorithms (linear, for example) compensate for backlash by always approaching focus from one direction. So I would recommend using linear algorithm with a geared stepper.
-- Kevin
Read More...



No work has been done on this.
Personally, I have an EQ6-R Pro mount, and I program PEC into the mount using PEMPro on Windows. I literally have an ancient laptop with Windows 7 on it that I keep around only for the occasional PEMPro run. I never use it otherwise. ")
After PEC is programmed into the mount from the Windows software, I then reattach my KStars/INDI system, enable PEC in the EQMod control panel, and it works well after that.
Read More...
I have no idea, I never tried. But Indigo is compatible with INDI drivers (or so I'm told). But I'm traveling this week, so I won't be able to do any work on it until I'm back home.
Read More...
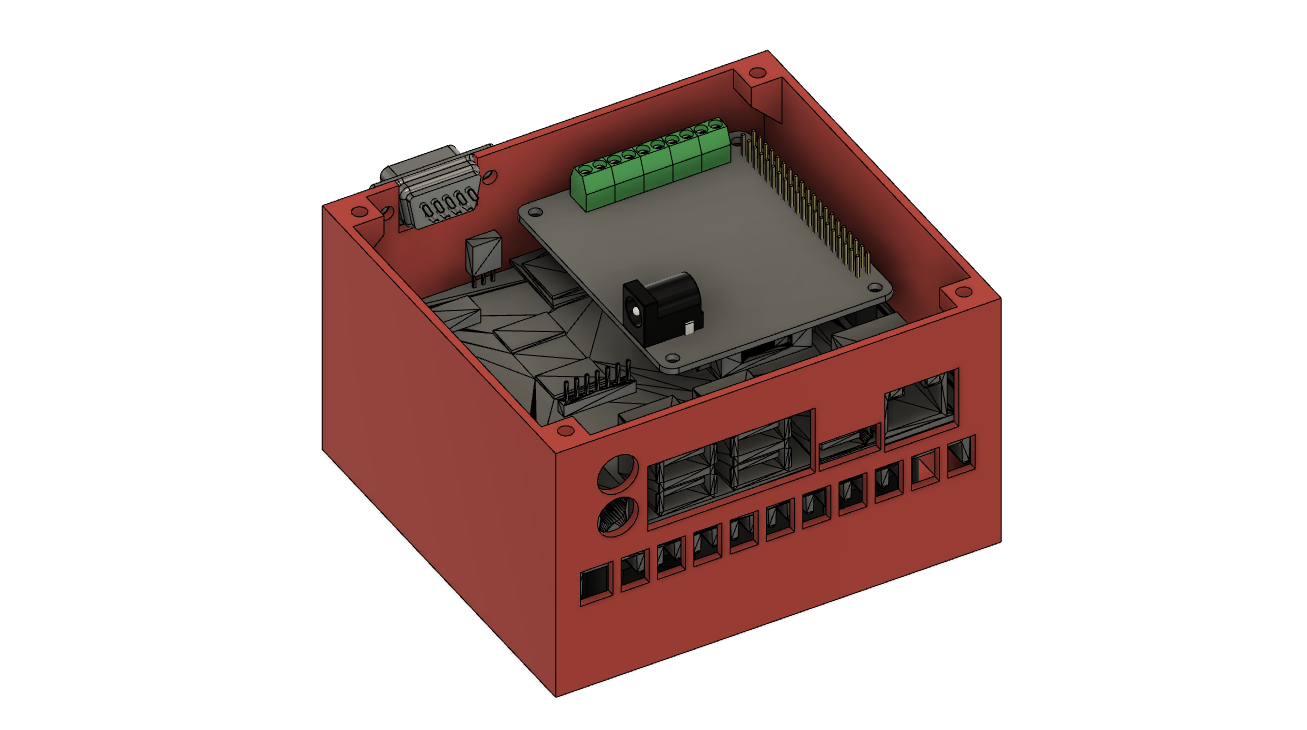
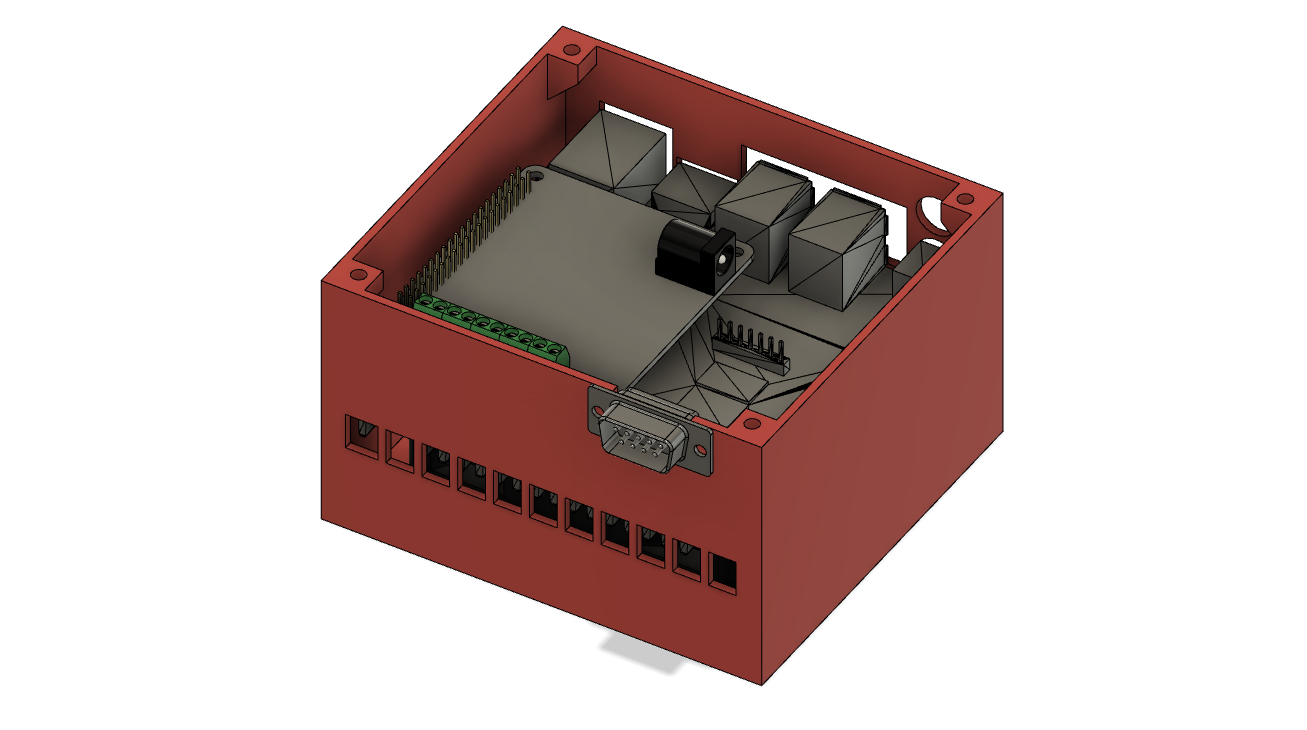
I also use a DB9 cable. The reason I chose a DB9 cable as opposed to something else, is because my Moonlite focuser comes with a DB9 connector. So I wired my DIY focuser the same, so I could swap back and forth between the Moonlite focuser and the DIY focuser, with the same HAT controller. As for how do I connect it to the HAT? I have a panel-mount DB9 connector in the side of my case, that I wire to the HAT. Here's a 3D rendering of the case I designed for my ODroid N2+ with Waveshare HAT.
As for the microstepping, the driver does not allow controlling the microstepping via software. It uses microstepping, but not for increased resolution, but only for quietness and smoothness. The reason is, to hold position on a microstep would require powering the motor continuously, causing it to get very hot, unless you adjust the potentiometer to limit the current. Also, stepper motors suck at holding position on a microstep. This HAT doesn't allow software control of current limiting either. So even though you have 32x microstepping enabled, the driver will always step a multiple of 32 steps, so that it always ends on a full step.
I've actually not heard of anyone needing the extra resolution of 32x microstepping to autofocus. Personally I use a stepper motor with .9 degrees per step (most are 1.8 degrees per step), and having that attached directly to the fine focus knob gives me all the resolution I need. I guess if you attached to the coarse focus knob you'd need extra resolution, but then the stepper motor usually won't have enough torque, and you would need one with a built-in gearbox, in which case you would have more than enough resolution anyway, with the gearbox.
Can you tell us more about your setup?
-- Kevin
Read More...
Yes and no. I have a Rock Pi 4B, which was an upgrade over a Raspberry Pi 4.
You *cannot* just insert an Astroberry SD card into a Rock Pi and boot it.
Instead, what you do is install a standard OS distribution,either Debian Buster (downloaded from the Radxa website) or Armbian Buster (which is downloaded from the Armbian website). Both are based on Debian, and will work.
Then you add the Astroberry repository to your APT sources.list, and install the packages. You won't get a full out of the box Astroberry experience, you will need to do some configuring, but it should work.
There are instructions on the Astroberry website. Go to documentation, then to the advanced install section. It says Buster isn't supported, but there are Buster packages available for Astroberry. I think the documentation is out of date in that regard.
I personally never used Astroberry because I'm a software developer and I just built everything from source code. I don't necessary recommend that approach to non-developers though.
Oh, and if you really want to speed up the Rock Pi, use eMMC and not an SD card. It's much faster!
I hope this helps!
-- Kevin
Read More...
There used to be an issue where the gpsd program would keep the serial port open (even though it isn't a GPS device plugged into it). I thought that was fixed in Astroberry, but I could be wrong. But I'd make sure gpsd isn't running (from a terminal run sudo killall gpsd).
Read More...
"Is it safe to assume that users who want to use a "dark filter" do not a scope cover, right?
I do have a cover for my scope. I just like to use the dark filter as an extra layer of protection against light leaks, especially if/when I try taking darks during the daytime.
Read More...
It looks like you haven't slewed the telescope anywhere. i.e. the scope is pointing at the north celestial pole (Polaris). Cailbrating the guider near the celestial pole could cause strange behavior. I suggest slewing to a target away from the celestial pole and try again.
Also, it isn't clear from the logs (at least to me) if you're using ST4 or pulse guiding. On the guide tab of Ekos, there should be a selection for guider, which will either be the name of your guide camera, or it will be EQMod. If it's the guide camera as the guiding output, then that means you're using ST4, and need to attach at ST4 guide cable from the guide camera to the guide port on the mount. If instead it says EQMod (recommended) then you don't need such a cable.
Read More...
The driver is here: github.com/k-ross/indi-wmh-focuser
There's a long thread about the driver in this forum. There are photos of some people's setups in there.
indilib.org/forum/focusers-filter-wheels...erry-pi-rock-pi.html
Read More...
Yes. My camera does not have a shutter. I have an ASI1600MM Pro with an 8-position filter wheel. I have 7 filters (LRGB, Ha, SII, OIII). I had an empty 8th slot, so I figured I'd put a opaque "dark" filter in there.
Read More...