


Answering myself
I finally got the courage to do the surgery on my mele and installed two antennas
While I have not done any scientific measurement of the gain (or lose) in signal, I tested the connection to my phone inside home, through several walls, and it seems to be quite good !

Read More...

Those with the MeLe (I went to the 2Q because it gets less hots and potentially uses less power for battery usage). Have you investigated if an external antenna can be added to improve the mediocre wifi coverage. What I opted for was to leave my phone outside acting as a router, but this is a bit inconvenient. Using an external wireless device is also not ideal thinking about power usage and if you need the 4 ports.
Find attached a picture of my MeLe 2Q around the wireless card. It has two antenna connectors with cables glued in place. These should be compatible in principle: www.amazon.com/-/es/Antena-RP-SMA-extens...tebook/dp/B07QKF18KM , but of course MeLe technicians adviced me against doing the corresponding mods (see quote below from them). Also I'm not fully sure one of these cheap antennas has a better gain than the internal one.
Read More...
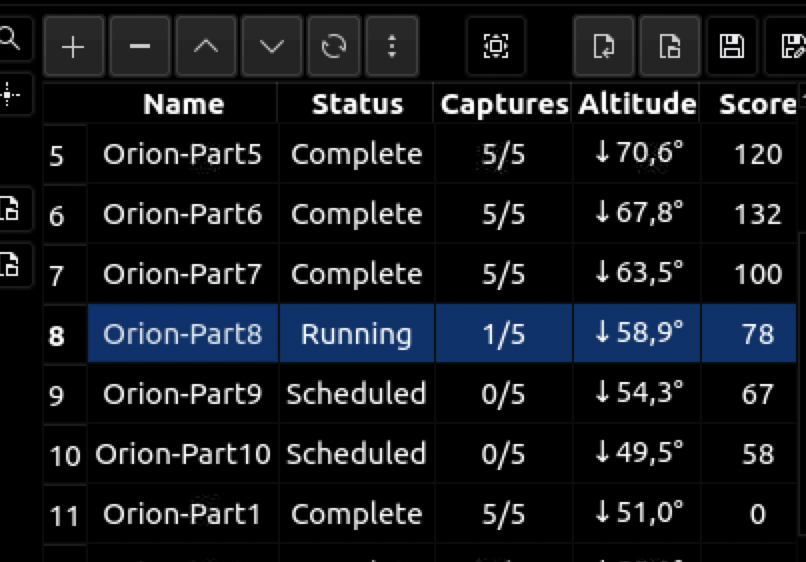
Exactly, as Ray says that repeats the actual job, not the schedule. There should be a way to loop 'over the loop' N times or indefinitely.
Also, given the request, there should be an option to equalize the jobs so that the zenith distance coverage is similar among the different mosaic panels, otherwise, the background can change dramatically if you go over big mosaics.
Read More...
I'm yet to find what would be my ideal brick:
- Intel celeron J4125 (less power hungry than a RPI-type ARM processor and runs colder)
- 4-8 gb ram.
- 128gb emmc.
- External SD card.
- 4x USB 3.0 + 1 USB-C PD for power with all the capabilities (i.e. display port etc etc).
- Wifi with external antenna port.
- Very compact layout (smaller than the MeLe), with no ethernet port, no hdmi, no audio jack, no M.2 SSD connector and all the connectors in 2 sides (or maybe even 1 side).
The closest things are the MeLe 2Q (however with a larger format, no external antenna port for wifi -this sucks- and many ports I don't need) and the Asi Air Mini (however with USBs 2.0 and likely more power hungry).
Read More...
I can only recommend the MeLe Quieter2Q. I guess the 3Q and 3C work also wonderfully.
Not only it is much faster than the RPI, but it is also small (even though a little bigger) and consumes even less power !!! .
Read More...
Hi,
I would like to have Ekos to clear calibration guide data either at the beginning of each session / night or at each meridian flip, but not during slewing periods (I see there is an option for that, but when you try to make mosaics it is silly enough to restart calibrating every time you move to the next part of the mosaic, which is non-sense). Is there any way to do so?
Mireia
Read More...
Ok, that makes lots of sense and matches what I showed the other day that it stopped 30 minutes before twlight. Will remove those 30 minutes ! Thanks
Read More...
Another trivial question. I used to be able to change the icon size in the toolboxes. For instance, I have one in the left to control the most critical parts of my mount (park, unpark, track, start ekos, indi devices, etc) and I used to like to have that right panel with pretty large icons. to be able to use them fine through vnc (with my phone touchscreen). However, in this new MeLe installation I can only set the icon size to default, no other options exist. Am I missing something?
Read More...
There is an option in the configuration of Ekos -> Scheduler for offseting dusk and dawn, but I'm not sure it works or where it is documented what are the units of the values you need to enter. Yesterday my scheduler stopped at 6 AM and there was still another 20-30 minutes of darkness I could have been used ... and I just didn't manage to get the scheduler to continue running for them.
Read More...

Sorry to revive this old thread, but is the use of more than one ZWO still so-so in terms of performance/issues or is it now working flawlessly?
Read More...
I still find this confusing. Added twice a mosaic schedule, but somehow the jobs for the 2 runs share the status, therefore it will run only once. There should be an option to keep looping over the jobs of the mosaic I think.
Read More...