


Hi,
I haven't figured out yet what's wrong. I've been imaging the last couple of nights. I've focused on targets high on the night sky and here the guiding wasn't as bad as before. Still RMS between 2 and 3 (sometimes higher), but if I try on a target lower on the southern night sky I get terrible guiding (RMS between 3 and 6). My PA is dead on with 9" error. I suspect that some of the error can be caused by balancing issues (eventhough nothing has changed on my setup!), but it's still very weird.
@escriban, what's your suspicion leaning towards?
Anders
Read More...
Hi,
I've been using Ekos for 1,5 years now and I haven't had any real issues with guiding before now. I did quite a bit of imaging in 2020 without problems, then had nothing but bad weather etc until February 2021 where I finally got around to do some imaging again - Nothing had been updated in Ekos in between. However, this time I had soooo many problems with guiding, with RMS way over 4, then dropping to 1.5 or so and then spiking again over 3 or 4. Most problems in R.A but also in DEC. I tried going back from SEP to Smart algorithm and that helped a little, but I still had spikes well over 3 in R.A. My Polar Alignment error was 11".
I managed to get a decent result none the less, but I wasn't happy with my equipment. I decided to update Ekos to the latest in the repository and then test it out when the weather was behaving again. Tonight the weather is good, but my guiding (once again) sucks! I'm back on SEP, but it really isn't working out for me.
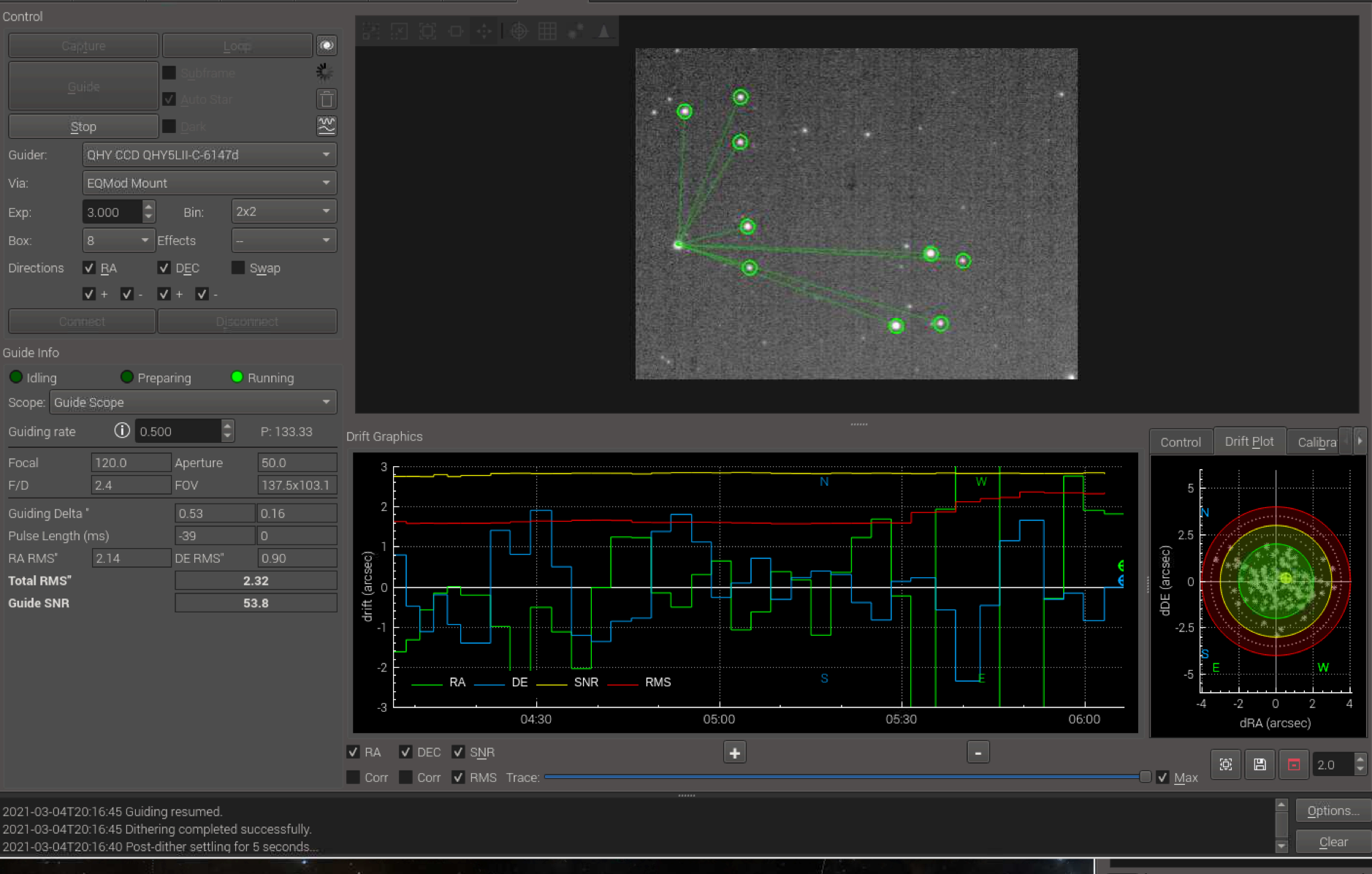
The guide star is lost quite often and the RMS is again looking bad. My Polar Alignment error tonight is 4".
My pulse setting is currently at 600 (also tried 400), exposure at 3s (also tried 1s and 2s) and box size is 8 (also tried 16). I've included a screenshot of the guide tab.
Any ideas on what has suddenly happened with my system?
Kstars/Ekos: 3.5.0, RP4 4 GB, HEQ5 mount (belt modded), QHY 5L-IIC guide camera on a 50mm guide scope. Using eqmod as "Via" option.
Read More...
mlarsson wrote: Hi!
My understanding is that if you use the refocus option in the Capture module, it will only refocus, NOT align (I haven't used it for a long while though). Like you, I like the scope to re-align now and then, not just to adjust for drift but for minimizing the risks of errors during a long night (at times scope seems to be off target when clouds have passed, for instance). So I set up a series of identical jobs, like 20 or 40 120-180 sec exposures, in the Scheduler. THen it realigns, re-focuses in the beginning of each job (after 20 or 40 exposures, depending on the capture sequence I use).
On the other hand: if the target drifts noticably during focusing, I'd suspect something being wrong - like polar alignment.
Magnus
Ok, that's a shame. It kinda removes the ability to use the "Refocus if temperature changes" option.
My Polar alignment isn't a problem (usually below 10" error), but I'm using the SEP - Linear focus method which is accurate and reliable but slow. When it's done the target has drifted a little bit. If using some faster focus algorithm and method the target doesn't drift noticably, but I've had some focusing issues with failures and dead locks. No issues (unless clouds appeared) with SEP/Linear. I'd really love a "Realign after focus" option in the Capture module.
Read More...
mlarsson wrote: Another option of course would be to use the refocus every.... setting in the capture window. For example, every 60 mins.
If you use this option in the Capture module, will the Sequencer then automatically align after each refocus? Even if you make a 100x180s capture file?
I've only tried the sequencer once for a mosaic, but I've always struggled refocusing on during capture as my target is drifting while the focuser is running.
Read More...
Hi,
When I first got my auto focuser last year, I used the default "Gradient" detection with the "iterative" algorithm (default settings). This worked in some cases and other times it failed (Deadlock or the need of a movement too large). When it worked it worked very fast.
In order to optimize my auto focus I change to SEP detection with Linear algorithm (default settings). This has been working perfectly for months until the other night* (see below). This method is, however, very slow, which results in my target moving pretty far in my FOV when Ekos refocuses eg. once every hour. To eliminate this I've disabled refocusing in the "CCD" (Capture) tab in Ekos. I'd love to have refocusing enabled once each hour or when a temperature change of eg. 2°C occurs.
What to do? Which algorithm and detection method for fast and reliable focusing?
*The other night I experienced my first failure with the SEP / Linear method. I wanted to try out the sequencer in Ekos to create a mosaic of the Andromeda Galaxy. Ekos should do the following in each panel of the mosaic:
Slew, Focus, Plate Solve, Guide and then capture 20 x 180s
The first panel was fine, the second failed due to failure to focus and the third panel was fine. This was my first time with a focus error with the SEP / Linear method. I had to throw my images away though, because M31 wasn't in the field captured at all! No idea why, but that's another problem.
Read More...
I experienced the exact same Monday night with my HEQ5 mount. I’ve never experienced it before. I ydes the ASTAP solver, but everytime I moved the star into the middle of the crosshair my error had increased by 2-10’. I tried 3 times all with the same result. Then tried switching to the internal astronomy.net solver and suddenly my error decreased (that is, without making any adjustments to my mount!). One aligment routine later and my error was 11”. One additional run of the PA routine (just to check the error - so no adjustments made) again gave me an 11” error.
It seems my problems got cured by switching from the ASTAP solver to the offline astronomy.net solver.
Read More...
Hi Jasem,
Unless KStars/Ekos automatically updates itself etc. then this cannot be the answer as the output written in my latest post was from yesterday. And I haven't updated anything since then. However, when I now look at the Julian date written in the output and online convert it I get the date (by removing the number 24 in the beginning of the date) April 22nd - 2020 (today) and not yesterday?
But I hope it works now.
Anders
Read More...
And now it won't crash! I bet that tonight when I set up it crashes...
But last night I copied the output from the command line. Here's the interesting last part of it:
[Warning: Spoiler!]
A backtrace from gdb of one of the crashes from my previous install (using the AstroPi3 script) is in my original post.
Read More...
Ok, I've gotten closer to a possible reason:
AF3 worked great until suddenly it caused Ekos to crash. I've so far installed Ekos using the AstroPi3 script. I decided to test out AstroBerry to see if that made any difference. Then AF3 connected without problems and everything was great again, until I hit the good old:
sudo apt update
sudo apt upgradeThen the AF3 wouldn't connect anymore and caused Ekos to crash. I decided to check the log files, but they weren't there (logging was turned on). I then tried turning logging off and suddenly the AF3 worked again and no more Ekos crashes. Turning logging back on caused yet another crash! I've also tried the AF2 driver (basically the same as the AF3 driver) and that worked once in a while with logging and sometimes it just crashed with Ekos.
I'm now running the AF3 driver without any logging turned on. That ran all night without problems. I wrote to Pavle Gartner (the guy behind DeepSkyDad) and asked if he updated the AF3 driver, but he told me that it's still the same version as always.
So, could it be a bug in the logging code which clashes with the AF3 (and AF2) driver?
Anders
Read More...
All installed at the same time as kstars using the AstroPi3 script. Worked two nights ago and crashed last night. Nothing had been changed or updated between the two nights.
Read More...
Hi,
Two nights ago everything ran smoothly without problems. I'm running Kstars 3.4.1 (build using rlancaste's AstroPi3 script a week or two ago) on my RP4 4GB unit.
Last night I had experienced something I've never experienced before with Ekos. I started Kstars/Ekos as usual and connected. I tried focusing, but that failed to find a star. I tried the polar alignment routine, but that failed to plate solve due to a blank image. I tried capturing a 30s light frame but that just came out blank as well (and yes, my lens cap was removed ![]() ).
).
I then tried rebooting my RP4 unit, started Kstars and then opened Ekos. I selected my usual profile but just after that Kstars/Ekos crashed (segmentation fault) - it just managed to open the Indi control panel before the crash. When re-opening kstars and starting Ekos I was told that the indiserver was already running. I shut that down and tried again with the same result - seg. fault. I tried some debugging with just the mount and my ccd camera in a profile. That worked and everything started.... BUT when capturing a light frame as a test it was just blank. Also slewed to other places in the sky resulted in blank frames.
I always start kstars from the command line. I got these messages last night:
[Warning: Spoiler!]
I looked at my Indi settings for my camera and noticed that most of the settings had been reset to default, except gain, offset and WB settings. Everything else had been reset.
I disconnected and tried adding my focuser (DeepSkyDad AF3) to my profile again with a seg. fault as my result...
I ran 'gdb --ex run --args kstars' and got this:
[Warning: Spoiler!]
As a last resort I tried running kstars as "root" using 'sudo kstars'. This started a brand new instance of kstars and I had to set up my devices etc. again but that worked. Actually it ran better than ever - I've never had the Polar Alignment routine run as smoothly as this time as the refresh just smoothly refreshed the image every second. When running this normally it's sometimes a bit clunky in refreshing. Also the focusing was running like a dream and very fast. I then tried disconnecting my profile, shut Ekos/Kstars down and opened again. Selecting my profile and.... seg. fault! Tried just the CCD and that worked but everything in the settings was back to default again?!
I gave up! It was one of the clearest nights in a very, very long time and I couldn't capture anything. Very, very frustrating.
What's going on?
Read More...
I can report that I experience the exact same error with videos recorded with my ZWO ASI 294MC Pro camera (and actually also using the CCD Simulator!).
How can I change the SER-file header to see if that helped?
Read More...
Ok, I just tried using VNC through the ethernet connection instead. That's faster, but still lagging a little bit (but it's nothing alarming). Is there a way to get the Ubuntu server to do the following concerning network connections:
1) If ethernet is connected, WiFi signal is disabled
2) If no ethernet, then enable WiFi and look for a known WiFi (eg. my own WiFi at home) and connect to it
3) If no known WiFi is found, then use the RP as an access point.
I can't even seem to figure out how to connect the Ubuntu server to my home WiFi....
Read More...