


Hi Wolfgang,
Sorry for the late reply, weather has been dreadful...
So far I had only last night with the given conditions to reproduce and your fix worked, flats were launched at given time even though previous sequence had failed.
Thanks again for your excellent work and commitment to the project!
Cheers and CS!
Carl
Read More...
Jeez thank you so much!
Well heavy snow is forecast today and tomorrow, followed by two weeks of disgusting weather ^^ It is almost like when buying new gear grin.png
But if weather does cooperate I will compile it and provide you with feedback, is it best to comment the pull-request or report here?
Read More...
Thank you so much for your help, yes that makes so much sense.
I think, at least I hope grin.png, this is linked to my aggressive 30 sec wait before retry aborted job.
Increasing it should help if not solve. I have set it to 300s, waiting for some clear, but not too much grin.png, skies to test it
Read More...

I think your hypothesis is strong.
I have noticed that during alignment it switches filter sometimes. Sometimes before alignement, sometimes after, sometimes it focuses the "previous target" filter sometimes the Lum filter.
I think I found one reproductible case: Right after meridian flip is completed, it will do an alignment, followed by one focus on Lum and then a focus on target filter.
Another case I saw, when it doesn't manage to do focus, it seems to revert to focusing Lum filter at some point.
Perhaps this together with a concurrency lock could cause the issue I have.
I went through a few analysis files and could find one, with filter changing behavior:
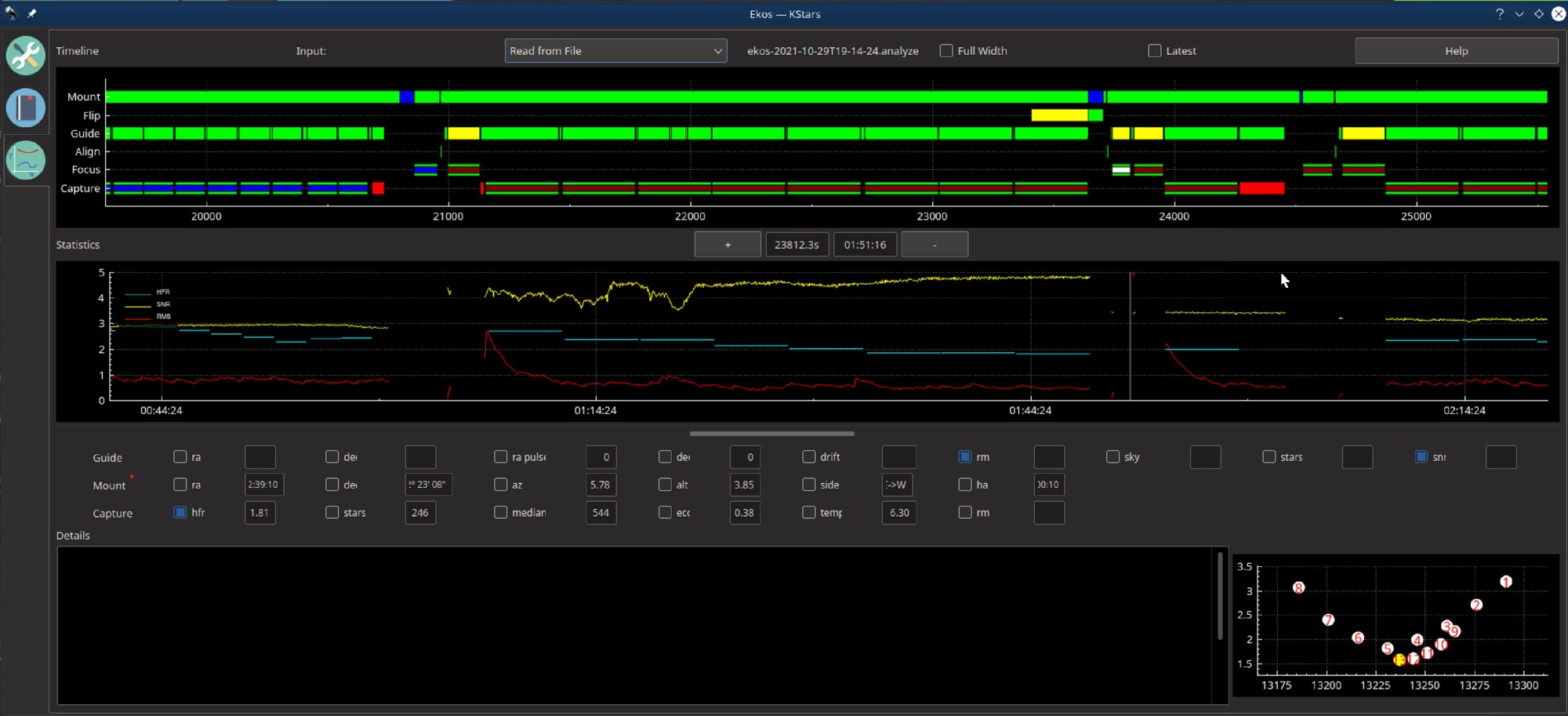
and one with reverting to lum filter:
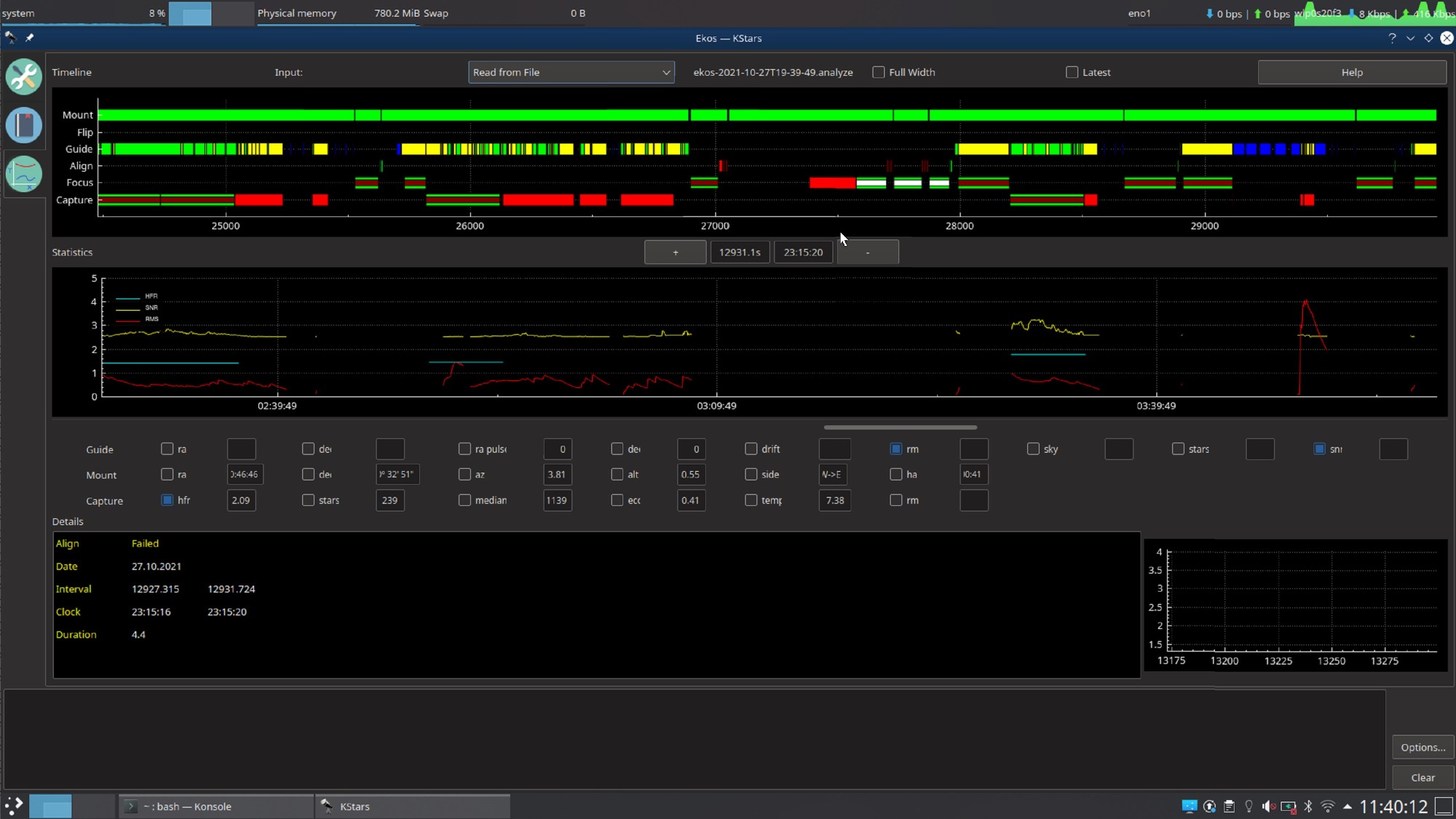
Read More...
Yes indeed I have focus checked for all targets/sequences but the flat one.
I am not sure I get your question, initially I have Lum set in the focuser tab, but it changes according to my sequence filter.
Read More...
Yes I have autofocus checked for each filter. Also I remember checking "focus on filter change" somewhere, but couldn't find the option in current version.
Alignement is set to run using Lum filter and that night I was shooting Ha frames.
Read More...
Sure, here's the tail of the log:
Night-2021-11-18 is the flat sequence
It seems it isn't focusing, perhaps state machine is in the wrong state.
Read More...
No nothing, is activated for focus/guide limits in the flat sequence.
Also, none of Track, Guide, Align, Focus or any contraint is checked in the schedule for the flat sequence.
Read More...