

The main KStars planetarium window should have (its idea of) the local time in the upper-left corner.
I'm not familiar with Losmandy mounts, but someone just asked a very similar question on CN: www.cloudynights.com/topic/916870-losman...-time/#entry13362959
Apparently the Gemini system does not have an automatic DST setting.
Read More...
The first thing to check is that the mount, KStars and the computer all agree on what time it is. Have you recently switched to 'Summer Time'?
Read More...
I use the internal guider sometimes, also. I got into the habit of using PHD2 when I was coming to grips with my first mount. You get a more transparent view into what the guider is doing and all of its settings with PHD2. On the other hand, PHD2 (at least with Ekos, at least for me) has an annoying habit of losing track of the profile and telling me that I need to use the wizard to make a new one. But neither guider has a substantial performance advantage.
Read More...

I find essentially no Dec backlash. The other night, just to check, I enabled backlash compensation in PHD2 at the minimum 20ms value. 4 hours of guiding later, PHD2 had not increased the compensation time at all, confirming that there is at most 20ms of backlash. [the Guide Assistant always reports a few hundred milliseconds, but that is based on just a single direction reversal and I have never found it to be even close to reliable]
Read More...
Likely a lot more users of the non-EC version. A lot would be in common between EC and non-EC, of course. I think there's some consensus that the encoders are not so great as to be worth the extra cost vs the non-EC, which keeps the number of EC users down (but I have no direct experience with the performance of the EC version).
There is (or maybe was?) a weirdness if you use an rPi, in that the CEM40 uses a usb-serial chip that does/did not have the correct driver for rPi. I used a non-powered usb hub in between the pi and the CEM40. I actually still use the hub even after switching to a mini-pc, because I just swapped the pc in. Maybe some day I'll take the hub out ")
Otherwise, not much in the way of Ekos/SMate issues. If you want to park at the NCP, you need to "find home" then manually slew just a tiny bit off from home and set that as Park, else it is prone to getting confused about where to park.
Performance of mine has been excellent. Consistently guides below 0.5" RMS when loaded with an AT130EDT.
Read More...
I suspect it was your "fresh install of Ubuntu 22.04 LTS" that was the problem. Every time Ubuntu does a substantial update it puts the old version of fxload back into sbin. I keep a copy named fxload.good there so I don't need to keep hunting for the right version.
Read More...
Basically the same here - *except* I always use Low Noise Mode ON. I have never seen a reason to not use it.
I also run my heater at 4, because I had problems with frost forming on the sensor window. Mine is an early Risingcam, and I believe they may have improved the heater in newer versions.
I do fine at offset 300, but there's no harm in a bit higher, either.
Read More...
No one ever replied - which is understandable given that I now know what happened. I switched to using the Omegon Pro driver, which works fine. After updating to 3.6.9 I figured the toupcam driver for my installation should be repaired and had another try - with the same weird result.
But, when I checked the statistics in fits viewer (which I guess I had not done when it first showed up), I had separate R G and B stats. The problem, as it turns out, was that my toupcam driver had somehow set to RGB mode instead of RAW-16. How? Who knows. But it is fixed now.
Read More...
Risingcam IMX571c camera
This is a weird one. I had not used my setup since mid-December. Today I was doing some indoors testing with ways to take flats. One of my test exposures failed to leave "Capturing". This is not (unfortunately) all that unusual. The driver eventually crashed, so I stopped and restarted KStars & Ekos. From then on, any exposure looks like:
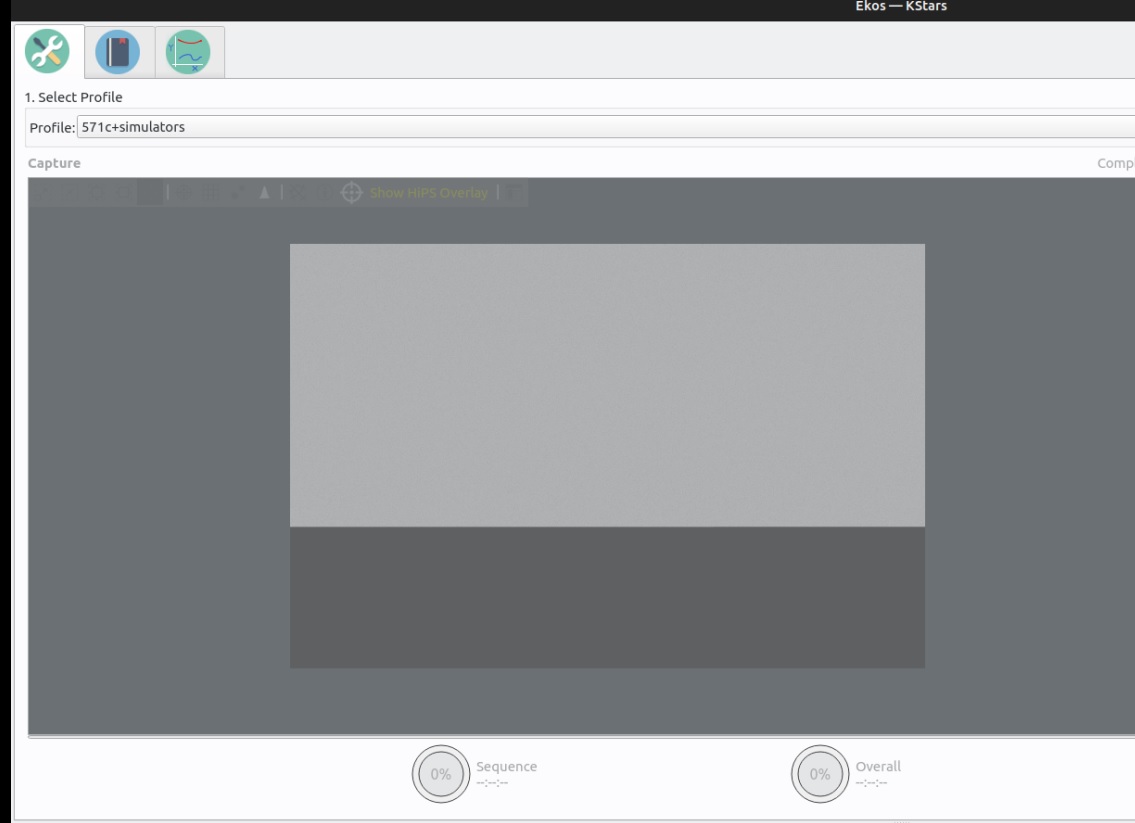
Stopped and restarted a couple more times. Tried capturing a dark a flat and a light - all the same. Shut down all power and rebooted. Still the same. I have used the camera previously with the Omegon driver, so I loaded that profile. That works normally.
Updated all the software, including of course to the latest KStars main branch build. Still corrupted images with the toupcam driver.
Is it possible to replace just the touptek driver, in case the file itself somehow became corrupted?
I don't see anything too odd in the log from when the crash occurred.
Read More...
(I assume you are using the newer Polar Align where the scope does not need to be pointing at the pole)
I usually start near the meridian and typically Declination 60° or so (but the declination is totally unimportant). I start near the meridian because the most important thing is that the polar align RA rotation must not *cross* the meridian (it seems to ignore all safety stops and will happily just keep going and crash the scope into the tripod). So if I happen to start on the east side, the rotation must be to the east and vice versa.
Sometimes there are clouds in one part of the sky, so I polar align on the other side. Some people might also have a tree or a building in the way on one side, so they need to be able to specify the other side.
Read More...
Thanks. I downloaded the file - I assume this requires building from source? Guess there's a first time for everything (not tonight, though - luckily I haven't disassembled the rig in a while and I have 3-week-old flats that still work).
Though I thought that a fix had been committed, so I was expecting it in the current nightly build.
Read More...