


@Jasem, could you please share more details about a place where the Custom Drivers can be defined? I cannot find it.
I use KStars v. 3.5.9 and as long as one problem (indilib.org/forum/ccds-dslrs/12804-indi-...asi-ccd-crashed.html) is not solved, I'm not happy to upgrade my Astroberry server. I'm not good enough to compile from source.
Anyway, I'm just finishing adapting a russian TAIR-3-PhS 300mm lens to the purpose of astrophotography and I realised that INDI/Ekos force me to change settings obtained with some effort. The lens will be equipped with ZWO EAF, like another refractor, which is my main scope now.
Thanks in advance,
Martha.
Read More...
@Doug, @Peter, thanks for another guide.
I realised that I should have literally very accurate caliper to be able to measure a difference affected by the movement like i.e. 10 steps. I have two calipers with digital displays and one vernier caliper which I prefer because of its absolute indications. The "digital" ones like to lose their zero position by accidentally pressing the zero or other buttons. The impossibility of making a very accurate measurement prompted me to place my own method based on interpolation here, maybe someone else would like to repeat it. It gave me a very probable result, similar to the results already mentioned in this thread.
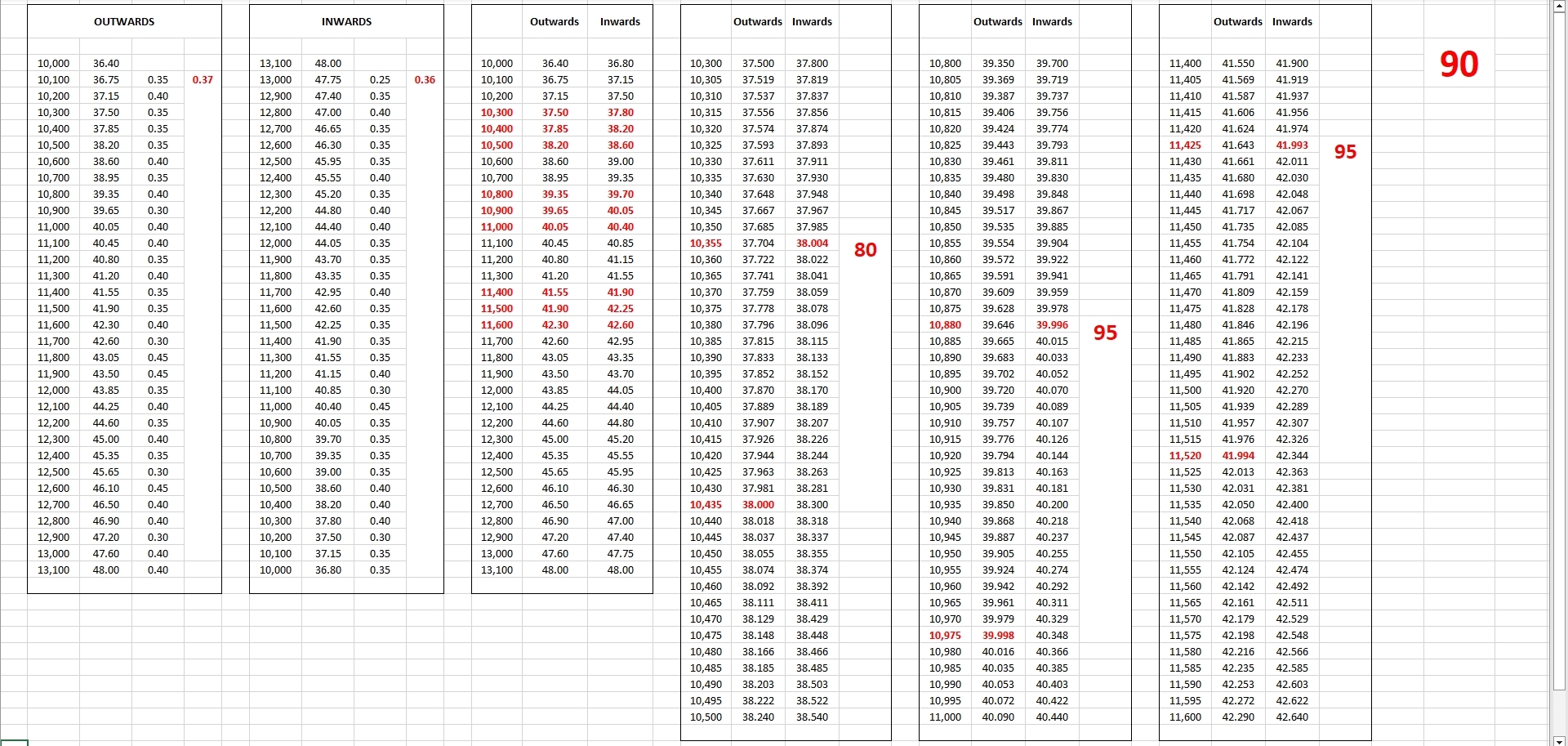
Right, so I assumed steps equal to 100 ticks and beginning at 10,000 i Performed 31 steps. Every measure, especially a difference between the actual and the previous ones, even affected by errors related to the inaccurate reading, are summarized and divided by 31 that gave me an average difference between positions equal to 0.37mm for every 100 ticks. I made a chart giving me three positions of the tube where the backlash seems the same: 38mm, 40mm and 42mm. To be honest, I don't know why the backlash looks smaller in the right area of the chart.
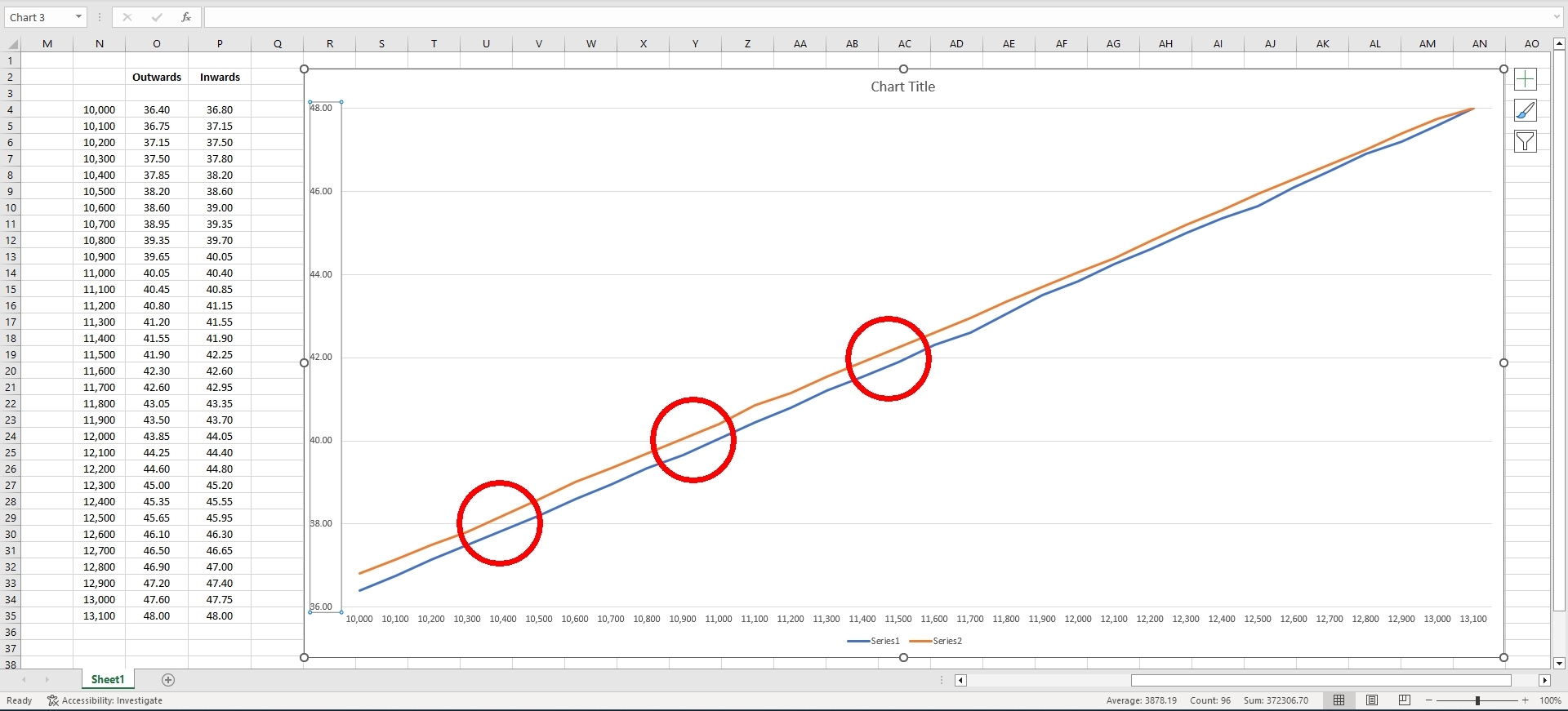
Knowing that, I interpolated the values of position of the tube as equal 1/20 their theoretical positions in relation to a 5 ticks step (1/20 of the 100 ticks step) for the three areas. I found values closests of the 38mm, 40mm and 42mm both for the outwards and inwards directions and found respectively values of the backlash: 80, 95 and 95 ticks. Thus the average value is 90 ticks. Doug wrote that it should be between 80 and 100, so it's exactly in the middle between them.
You probably guessed that I like Excel.

Anyway, thanks for encouraging me to perform the experiment and now I'm ready to try the polynomial algorithm as well.
BTW I just checked the version of the Kstars/Ekos which I use, it's 3.5.9. I already performed the "update | upgrade" procedure to be able to test a patch in the INDI driver for OnStep firmware. Unfortunately, after the successful upgrade (observed) I found that both the Canon DSLR driver and the ZWO CCD driver didn't recognise my cameras. I always have at least two microSD cards for my RPi, just to quickly swap them if i.e. file system crashes (often happens in the RPi 3B+, RPi 4 seems OK yet), so I checked whether the cameras work. I described the problem here:
www.indilib.org/forum/ccds-dslrs/12804-i...asi-ccd-crashed.html
As long as the problem is not solved, I don't touch the higher version. It's enough for me to use the linear algorithm interchangeably with the polynomial one.
So, thanks for all now and let's see how it will behave.
")
Read More...
Thanks @Doug and @Peter,
@Doug, the presented V-curve is not the most weird, look please at the one below. I began at 7715 and finished at 7715, the HFR is even better, but the shape is not. Can you try to explain this behaviour?
I'll try the 7% next time and then will also try to shorten exposures with higher ISO value. Now I used 15s at ISO16000 (IDAS LPS-P2 filter), I'd like to drop it to 10s or less, because it takes time as well.
@Peter, I cannot find the Linear 1Pass. I have only the following algorithms on the list: Iterative, Polynomial and Linear. Is the Linear 1Pass algorithm introduced in the most recent version?
I know that the polynomial algorithm doesn't take the backlash into account by default, but I don't know how to measure it. It must be a long cloudless night to test everything, without the rush and risk that darks or flats may fail because of sudden rain. I expected the rain at 5am, thankfully a tree appeared in the frame, so I stopped doing subs and finished at 3am. God, my location teaches me humility...
Read More...
Hi all,
I'd like to share results of my first focusing with the EAF and the linear algorithm: I love it! 
All calculation works perfectly. I didn't use the Bahtinov mask, just positioned the EAF at the calculated position taken from the previous session without the EAF: 7600 step. After five attempts it began behave properly and I found highly repeatable focus position: 7715 steps. Every time I go back to the zero position and then I position it again at 7715. Moreover, all the time I had a proper number of stars in the area 25%-75%.
I promised to compare the algorithm with the polynomial one, but please, not today. I have several hours without the rain, so I must to use the opportunity.
Look plesae at the animation of the process, the V-curve is iconic!
My setup:
Altair 102/715 EDT Triplet APO and Canon 6D
My Ekos settings:
Auto Select Star | Ful Field | Annulus: 25% 75%
Detection: SEP | Algorithm: LInear | Tolerance: 5%,
Initial step: 16 | Max travel 250 | Settle: 1s
Read More...

Thanks @Peter.
I already have the L-eXtreme and the Baader OIII filters. I agree that the OIII filter is not designed for the DSLR camera. But I experimented with separating the Red (in the grayscale) as Ha and the G+B (both in the grayscale) as OIII and I have to say that the results look very positive. I know what the RGGB mask is and I'm very optimistic in the idea that the double G and B can collect some significant amount of proper photons. My Canon 6D is modded, so it collects too much red light, so the separation is difficult. But I am considering adding a stack of the extra OIII subs to the G+B channels. Just look at my pics of the Heart and the Soul nebulas post processed in the typical way and in the new approach:
www.astrobin.com/users/Vroobel/
Finally I know why the pre-focusing as best as possible before the run of the focusing is so crucial. I'm going to find the best initial position using a Bahtinov mask that I designed and printed (satakagi.github.io/tribahtinovWebApps/Bahtinov.html). Since then my routine will be as follow:
1. Zeroing the position with forcing the real zero at the EAF as well,
2. Moving to the position defined experimentally with the Bahtinov mask,
3. Running the focusing procedure.
I found that after positioning the focuser at the real zero, the end of the travel through all the length of the tube each time takes nearly the same number of steps, so I assume that the initial position for the focusing procedure will also be nearly the same each time.
As I wrote, I'm going to compare the linear algorithm with the polynomial one.
Martha
Read More...
Thanks @Doug and @Peter.
Indeed, I use a refractor with the RnP focuser and indeed, its very long in comparison to the NCFZ, but I think it's for the purpose of accessories I can attach.
Speaking about the accessories, I don't have the filter wheel and also have no mono camera yet, but only the Canon 6D. I use 2" filters and I think about the filter wheel to simplify my work. I.e., I think now to use an OIII filter to extract more oxygen from nebulas. But I don't understand the offset, what is it in the context of the focusing? I remember from the documentation that I can set fixed number of steps that I can add or subtract from the given by the algorithm value, am I right? Shouldn't I need to refocus then?
Martha
Read More...
Hi Doug,
Unfortunatelly, there is very cloudy and rainy outside, so I perform my measurements and calculations at home. I MUST be abolutely sure what am I doing before I go outside. That's why I ask for support. All my calculations are made in the Excell, so it's easy to verify it and to change the values quickly.
The EAF has a great feature that it detects a too high torque and it stops then. So I know where is its real zero position and where is its real end position. But I didn't ralize till now that if I moved the tube to the zero position it didn't mean that the count ended with zero, but i.e. 147 instead. Requesting the zero several times moves it slightly, step by step more inwards (76, 42, 1) while I can hear the movement and finally it stops at zero, so I cannot heare the work of the gear. As I wrote earlier, I measured the maximum extrusion using the vernier caliper. I read a rough distance on a scale engraved on the tube after 10,000 steps and based on that I calculated a rough number of steps needed to reach the end point that is around 95 mm. I requested the Ekos to perform the full extrusion and then I found out that I have to add some steps in Ekos/Focuser tab. I set the step as 25 and was adding the value to the calculated number by pressing the "arrow up" button. This way I found earlier that the end position was 25,992 steps.
As I wrote, the EAF stops automaticaly, when the torque is too high. It ends the travel at the end of the toothed treadmill and confirms it by double beep. I positioned the EAF and the focuser at the zero position and requested the Ekos to move it to a 27,000 that is over its capability. Now it stopped at 25,703 steps, maybe there is the backlash invlved. So I repeated the scheme: moved to the zero (it stopped exactly at zero and I can see that there is no gap) and again to the 27,000 - now it stopped at 25,822 steps. And again: 25,805. And once again: 25,803. As you can see, the number of steps is not trustworthy too much, unless you physically force the zero position. Now I can say that all the path takes the EAF ~25,800 steps. It doesn't change too much in the final values: 1 step means 3.658914729 µm while 1 µm means 0.273305085 step.
I assumed 5% of the tolerance and 2 arcsec seeing, but I can assume now the 10%, as you wrote, at least for the beginning. What about the diffraction limit? Can I use the average 130/D value?
I found another my fault in the calculation of the total seeing: I forgot to multuply the diffraction limit by 0.2... Ooops.
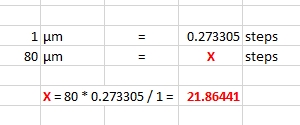
Now the NCFZ is 80.18745577 µm. So, even for the full value of the NCFZ the Step Size is 22 steps, because 1 µm meas 0.273305085 step. If I understand it properly, Step Size = NCFZ (or 1/2 NCFZ) * 0.273305085 steps = ~22 (or ~11).
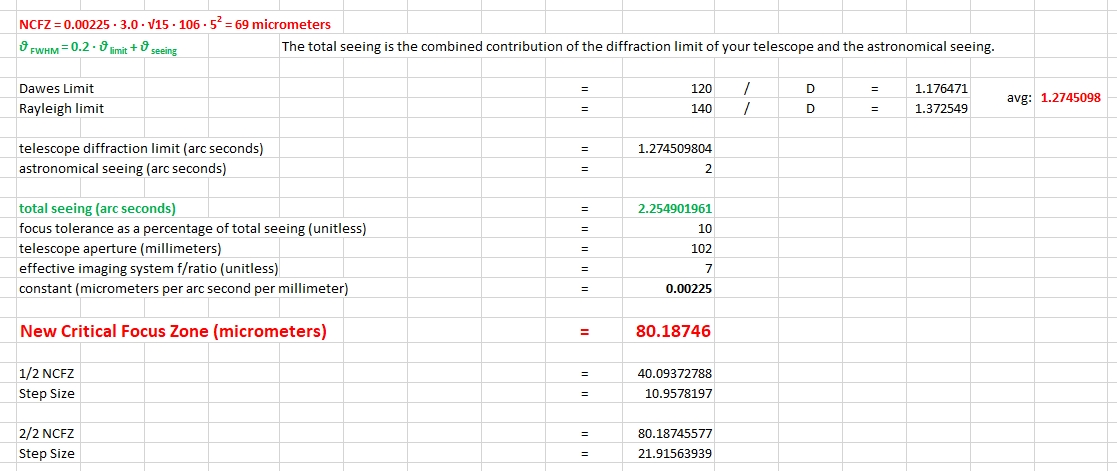
The top row in the picture is the example from the website.
Our calculations are similat till this point. I think we calculate different the Step Size. If I multiply the NCFZ by 3.658914729 that is the movement caused by 1 step expressed in µm, then I get 293.399063 that is very close the result expected by you. But If I following the proprtion below, I get a the value of 22:
Doug, where is the main fault?
Martha
Read More...
I made a quick test. I assumed that the Step Size comes from not 1/2 NCFZ, but straight from the full value of the NCFZ, so the Step Size is 26. If the linear algorithm moves the tube owtwards for 10 x Steps Size that is 260 steps, then the tube moves outwards less than 1mm. And that should be OK, as my calculation says that 1mm means 275.3390 steps.
But my question is still going: if the proper sampling begins after coming back, inwards, at the position of -5 steps, so is it able to find the focus within less than 1mm? (-5 steps, +5 steps)?
Martha.
Read More...
@Jose, @Doug and @John,
Thank you for your answers. n the beginning I decided to fillow the Doug's advice, especially that I understand all the NCFZ rule.
1. I measured the full travel of the focuser tube using a caliper and it's 94.4 mm. In the meantime the EAF performed 25,992 steps.
2. I found out that 1 step/tick mens 3.631886734 µm, please correct me if I'm wrong.
3. I didn't find whether for the diffraction limit I should use the Dawes limit (120/D) or the Rayleigh limit (140/D) so I took an average value 130/D.
4. I solved the equation for the 102mm F/5 refractor and for everage seeing that is usually around 2 arcsec and my NCFZ is 42 µm.
5. I found on the 2nd page of the mentionet thread that the Step Size should be equal to 1/2 of the NCFZ. Should I understand that if 1 µm means 0.275338983 of the step/tick then the 1/2 of the NCFZ is 21 * 0.275338983 = 5.783512841
-> 6 steps ???
I cannot believe that so small movement may change something.
I really want to understand it, so Doug, please help me.
Read More...

Hi guys,
I'd like to refresh the thread. Recently I bought a better class Altair triplet and the first impression says that it has a higher quality focuser. I tried to compare the refractor with another one that I have, it's optically superb Altair Starwave 102ED F/11 equipped with an ATM motorised focuser controlled manually via Arduino. I tried to capture Mars using the two refractors subsequently. I found that the focuser of the triplet keeps the planet perfectly in one place (excellent PA), while the focuser in the cheaper F/11 doublet is lifting the planet up or dropping down depending on moving the rocuser inwards or outwards. Did you take this problem of cheaper focusers into account?
Very soon after purchasing the triplet I decided to buy the ZWO EAF. I already performed three motorised focusers, one is driven straight by OnStep/Ekos, while two other are driven by the Arduino and my code. In the case of the triplet I expect excellent quality and comfort of focusing, that's why I ordered the EAF. It's installed now and waits for the clear sky. I'm going to perform a test of the backlash by moving it outwards for a number of steps and inwards.
My EAF is attached straight to the main axis of the focuser instead of the single knob and here I have a question about the number of initial steps. Some of you write that they set initial steps of 200-500 ticks, while others write that they use 20-50 ticks. What does it depend on? I have read all the thread and nowhere is mentioned whether the stepper motor should be attached to the main axis or to the 10:1 reducer axis. The ratio of 200-500:20-50 suggests that the bigger values are related to the reducer axis. I found (using a Bahtinov mask) that I get focus around 7600 ticks, which is around 27mm from its absolute zero position. Is it OK?
My second question is about the bin2 mode. I use a Canon 6D that has a quite big 6.54um pixel. The cameras mentioned within the thread usually have something about 3.7um pixels. I understand that my pixel works like 4 others, so should I consider the bin2 mode (if the Canon 6D offers it)?
I use a 3" x1.0 field flattener, so my stars are slightly elongated on edges of the full frame and of course in the corners. I think the 75-80% as the second value of the annulus should be OK.
I consider configuration like below:
- full field (should the "autoselect star" be selected then?),
- annulus 25% - 75(80)%
- SEP,
- linear algorithm,
- 5% tolerance,
- initial step 50.
Please let me know if I should think about something else. The good weather in the UK is so rare that I have no time for long experimentation. I appreciate your common experience and knowledge.
I will test with pleasure whether the linear algorithm brings the same focus point and the HFR like the polynomial one. I have experience with 10" budget Newtonian OTA equipped with Hexafoc 2.5" RnP focuser and the polynomial algorithm working with the ATM geared stepper motor (OnStep) and I was quite happy with the results, if the process was successful. Unfortunately, most often it fails. I hope the linear algorithm with the EAF attached to the high class focuser will surprise me positively.
Best regards,
Martha
Read More...
Hi,
I'm not sure whether it's a good place for this post, so please move it elsewhere, if needed.
After pointing some problems with the OnStep driver I waited for a new wersion of the INDI and yesterday I decided to do "update | upgrade" procedure. I always do backup of my microSD card and have at least two cards just in case. After the upgrade and rebooting I've got message that the indi_canon_ccd crashed:
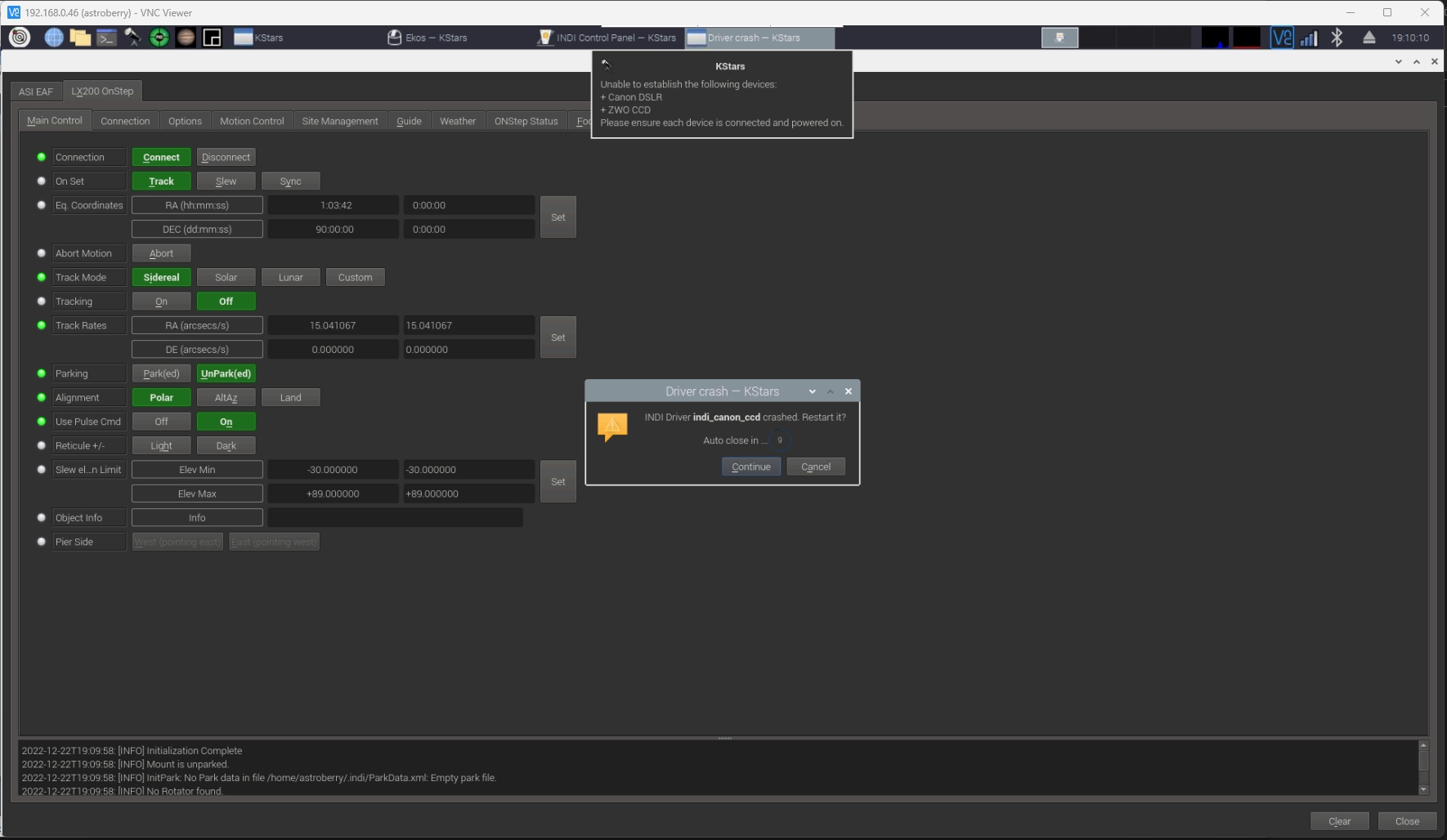
But apart from the Canon also the ASI224MC is not detected. I installed ZWO EAF on my refractor today, so I thought that it may cause the problem, so swapped the microSD cards - everything works OK with the previous version. Then I swapped the cards again to check the log. I found only that:
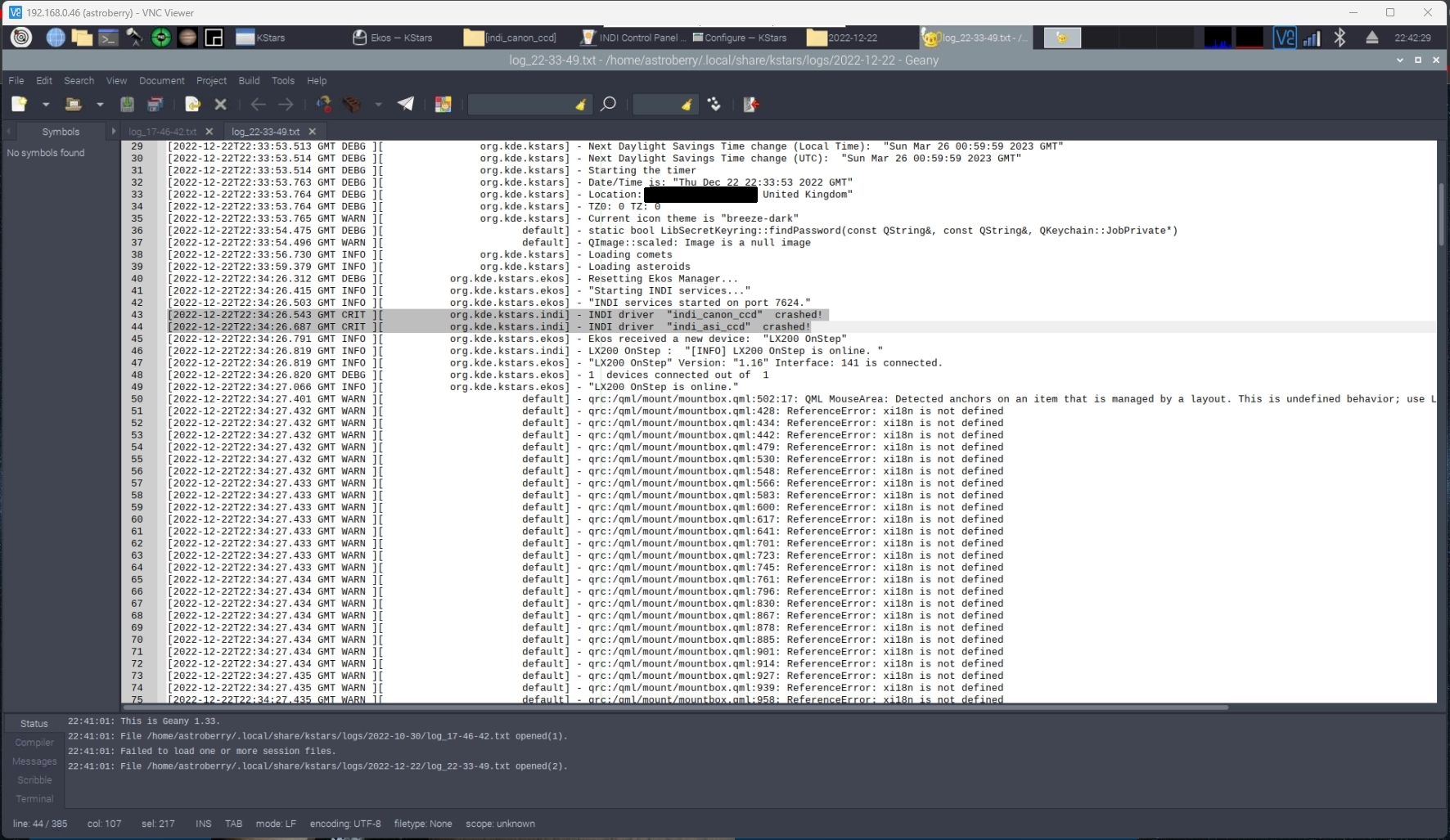
I'm not very good in terms of linux, just know the system in general and some commands. Did anyone meet the problem earlier?
Thanks for for support in advance.
Martha
Read More...
Thanks
I was sick as well, but it wasnt Covid, as many people around experienced. Dry cough, I felt a pain even in stomach. Now is better, bu the cough stil exists.
We had several freezing days, I turned the setup on at -4*C. Thankfully most of the time I was at home. The sky was like never!  An now we have clouds and rain again. I wanted to wait and grab maybe M45 or M31, but I think the whether won't change soon.
An now we have clouds and rain again. I wanted to wait and grab maybe M45 or M31, but I think the whether won't change soon.
So, keep warm, drink a lot (of water ") ) and Don't be tempted to go outside at night!
) and Don't be tempted to go outside at night!
Read More...
Hi Alain,
I see that the INDI repositories are updated, so I'll make a backup of my microSD card and will try to perform update | upgrade.
BTW, I just finished a video about building my fork mount, so if you have a spare 18 mins you can watch it.
Best regars,
Martha
Read More...