INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
AZ-GTI in AZ-mode tracking problems
- Jasem Mutlaq
-

- Online
- Administrator
-

Replied by Jasem Mutlaq on topic AZ-GTI in AZ-mode tracking problems
Please Log in or Create an account to join the conversation.

Replied by Mat on topic AZ-GTI in AZ-mode tracking problems

Please Log in or Create an account to join the conversation.
Replied by Mat on topic AZ-GTI in AZ-mode tracking problems
if you look at this records the only time the speed changes is with every change of the factor (while running) -> see green values and how the offset changes after setting a new factor. It changes ONE time, and than speed is back und the offset is on a new level:
AXIS1 offset (28) microsteps rate (571428) tracking rate (514285) direction (0) aggressiveness (1.00) hysteresis (0.10)
AXIS1 offset (15) microsteps rate (1066666) tracking rate (1011428) direction (0) aggressiveness (1.00) hysteresis (0.10)
AXIS1 offset (17) microsteps rate (941176) tracking rate (923344) direction (0) aggressiveness (1.00) hysteresis (0.10)
AXIS1 offset (18) microsteps rate (888888) tracking rate (881634) direction (0) aggressiveness (1.00) hysteresis (0.10)
AXIS1 offset (17) microsteps rate (941176) tracking rate (930326) direction (0) aggressiveness (1.00) hysteresis (0.10)
AXIS1 offset (17) microsteps rate (941176) tracking rate (932279) direction (0) aggressiveness (1.00) hysteresis (0.10)
AXIS1 offset (18) microsteps rate (888888) tracking rate (886554) direction (0) aggressiveness (1.00) hysteresis (0.10)
...
AXIS1 offset (17) microsteps rate (941176) tracking rate (937989) direction (0) aggressiveness (1.00) hysteresis (0.10)
AXIS1 offset (18) microsteps rate (888888) tracking rate (891169) direction (0) aggressiveness (1.00) hysteresis (0.10)
AXIS1 offset (17) microsteps rate (941176) tracking rate (938146) direction (0) aggressiveness (1.00) hysteresis (0.10)
CHANGED AGGR TO 0.80
AXIS1 offset (17) microsteps rate (941176) tracking rate (768840) direction (0) aggressiveness (0.80) hysteresis (0.10)
AXIS1 offset (13) microsteps rate (1230769) tracking rate (976817) direction (0) aggressiveness (0.80) hysteresis (0.10)
AXIS1 offset (15) microsteps rate (1066666) tracking rate (858913) direction (0) aggressiveness (0.80) hysteresis (0.10)
AXIS1 offset (13) microsteps rate (1230769) tracking rate (976894) direction (0) aggressiveness (0.80) hysteresis (0.10)
AXIS1 offset (14) microsteps rate (1142857) tracking rate (913829) direction (0) aggressiveness (0.80) hysteresis (0.10)
AXIS1 offset (15) microsteps rate (1066666) tracking rate (858985) direction (0) aggressiveness (0.80) hysteresis (0.10)
AXIS1 offset (14) microsteps rate (1142857) tracking rate (913683) direction (0) aggressiveness (0.80) hysteresis (0.10)
AXIS1 offset (14) microsteps rate (1142857) tracking rate (913700) direction (0) aggressiveness (0.80) hysteresis (0.10)
...
AXIS1 offset (12) microsteps rate (1333333) tracking rate (1050540) direction (0) aggressiveness (0.80) hysteresis (0.10)
AXIS1 offset (15) microsteps rate (1066666) tracking rate (858903) direction (0) aggressiveness (0.80) hysteresis (0.10)
CHANGED AGGR TO 0.60
AXIS1 offset (13) microsteps rate (1230769) tracking rate (755396) direction (0) aggressiveness (0.60) hysteresis (0.10)
AXIS1 offset (10) microsteps rate (1600000) tracking rate (954418) direction (0) aggressiveness (0.60) hysteresis (0.10)
AXIS1 offset (10) microsteps rate (1600000) tracking rate (954535) direction (0) aggressiveness (0.60) hysteresis (0.10)
AXIS1 offset (12) microsteps rate (1333333) tracking rate (810647) direction (0) aggressiveness (0.60) hysteresis (0.10)
...
AXIS1 offset (10) microsteps rate (1600000) tracking rate (954623) direction (0) aggressiveness (0.60) hysteresis (0.10)
CHANGED AGGR TO 0.50
AXIS1 offset (11) microsteps rate (1454545) tracking rate (745261) direction (0) aggressiveness (0.50) hysteresis (0.10)
AXIS1 offset (7) microsteps rate (2285714) tracking rate (1118981) direction (0) aggressiveness (0.50) hysteresis (0.10)
AXIS1 offset (10) microsteps rate (1600000) tracking rate (810808) direction (0) aggressiveness (0.50) hysteresis (0.10)
AXIS1 offset (7) microsteps rate (2285714) tracking rate (1119202) direction (0) aggressiveness (0.50) hysteresis (0.10)
AXIS1 offset (10) microsteps rate (1600000) tracking rate (811011) direction (0) aggressiveness (0.50) hysteresis (0.10)
i tried it the whole day and even wrote a "+400000" in the code for the trackingrate -> but it happens exactly the same thing i showed in the new logs... the offset value should change continuously (become higher or lower depending on the factor)
I'm a bit out of ideas now...
Regards
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic AZ-GTI in AZ-mode tracking problems
Please Log in or Create an account to join the conversation.
Replied by Mat on topic AZ-GTI in AZ-mode tracking problems
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic AZ-GTI in AZ-mode tracking problems
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic AZ-GTI in AZ-mode tracking problems
Please Log in or Create an account to join the conversation.
Replied by Mat on topic AZ-GTI in AZ-mode tracking problems
i'll test it as soon as any star shows up and report back! (at the moment... clouds...)
Please Log in or Create an account to join the conversation.
Replied by Mat on topic AZ-GTI in AZ-mode tracking problems
again: it is really great that you have implemented the PID changes.
Unfortunately the weather is bad, but I checked the sky again and again throughout the evening and dragged the mount onto the balcony when there was a small gap in the clouds.
I only did one platesolve and had the impression that the tracking drift was much less. So I started guiding and it just worked! The guiding was able now to correct the drift without going crazy:
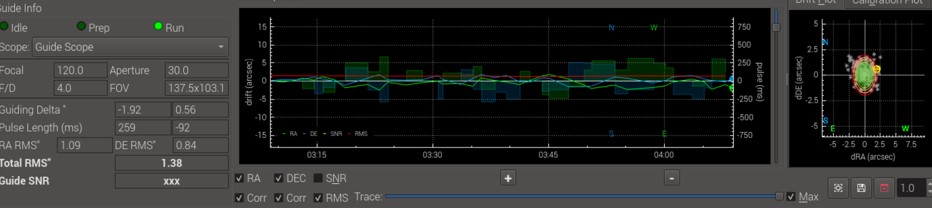
It was so cool - after a slew to another spot, i restarted and the guiding worked again for a few minutes with low RMS until the clouds came.
I think to really draw a conclusion I need a whole evening (or a few more), but I just wanted to report back that the first impression was very very good!
")
Regards
Attachments:
Please Log in or Create an account to join the conversation.
Replied by Michael on topic AZ-GTI in AZ-mode tracking problems
Mat, did you change any of the default values of the PID control or the T1 Clock Rate when you tested? if so, what values did you initially use if not the default? Also, thank you for putting in the testing this week on the other versions.
Please Log in or Create an account to join the conversation.
Replied by Mat on topic AZ-GTI in AZ-mode tracking problems
No guiding is required!
for me it was a good test to see if Tracking drift is so low now that guiding can correct. I only was able to test 15 minutes with values
1
0
0
And
1.2
0
0
Regards
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic AZ-GTI in AZ-mode tracking problems
Please Log in or Create an account to join the conversation.