Rigel Systems nFrame Rotator
Installation
Rigel Systems nStep driver is included with libindi >= 1.9.4 Under Ubuntu, you can install the driver via:
sudo add-apt-repository ppa:mutlaqja/ppa
sudo apt-get update
sudo apt-get install libindi1
Features
The nFrame rotator controller is a small absolute-position unipolar stepper motor controller that can work on a variety of motor configurations. It connects to your PC/StellarMate via Serial-to-USB cable It supports the following features:
- Speed adjustments: 254 levels of speed adjustment controls.
- Stepping Controls: Control the motor stepping mode and wiring phase.
- Sync: Set the rotator position to any arbitrary values to reset the position to the desired value.
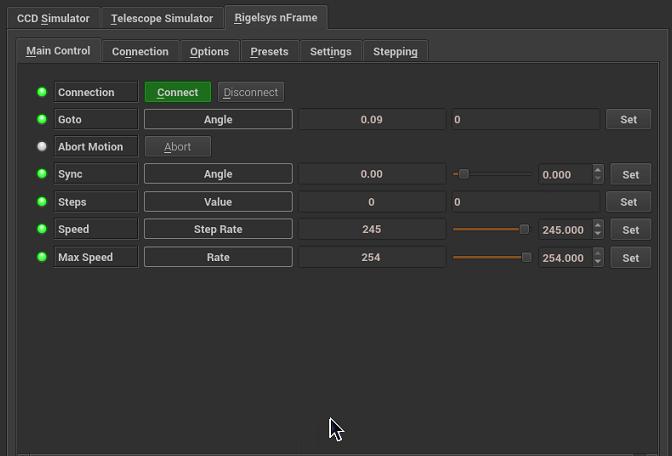
Main Control Tab
- Goto: Move to any arbitrary angle
- Abort: Stop motion
- Max Position: Define an arbitrary maximum travel position. Any GOTOs beyond this position are rejected.
- Sync: Set the current angle position to this value.
- Steps: read out of the built in temperature sensor or the external temperature probe if any.
- Speed: Set the current stepping rate, lower is slower
- Max Speed: Set the maximum step rate allowed
Connection
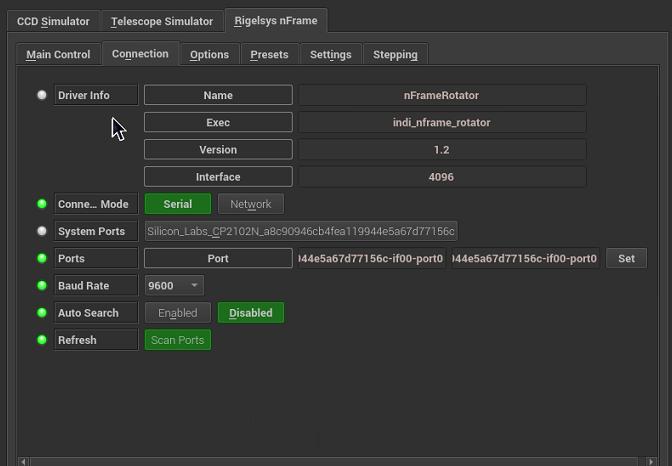
The rotator can connected to the PC/StellarMate via either a serial-USB connection or WiFi. Use Serial to USB adapter and connect it to a USB port. By default, the driver would try to connect to all available systems ports until a successful connection is made. It is generally recommend to employ the Serial Port Assistant tool to assign a permanent designation for the port. This would make connecting to the serial port reliable from the first time if there are multiple serial to usb devices being used at the same time by the system.
For WiFi nFrame controllers, click on Ethernet button to switch to Networked connection. Refer to nFrame documentation for configure the WiFi option. The IP address and port of the WiFi adapter is required to make the connection.
After making changes to the connection parameters, go to the Options tab and save the configuration.
Options
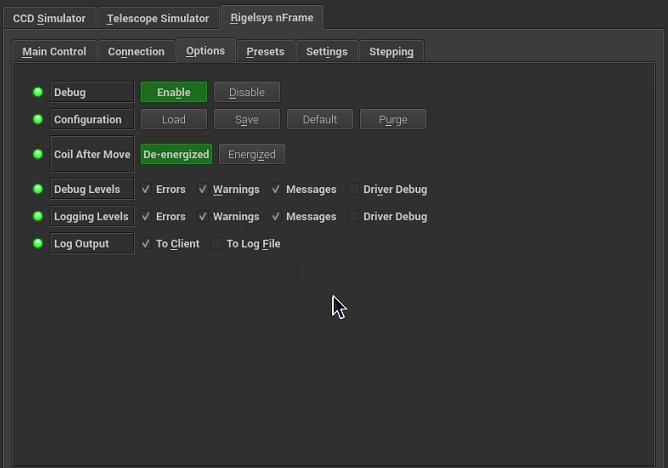
The options tab includes parameters to enable/disable logging and debugging settings in addition to polling and joystick control.
The debugging and logging options should remain off unless you are to diagnose a problem with the driver.
Polling: How often should the driver read the device output signals? By default it is set to 500ms or twice per second.
Coil After Move: Set whether the stepper coils should be energized or de-energized after motion is complete.
Caution: When set to energized, watch the stepper motor temperature as it might get warm.
Presets
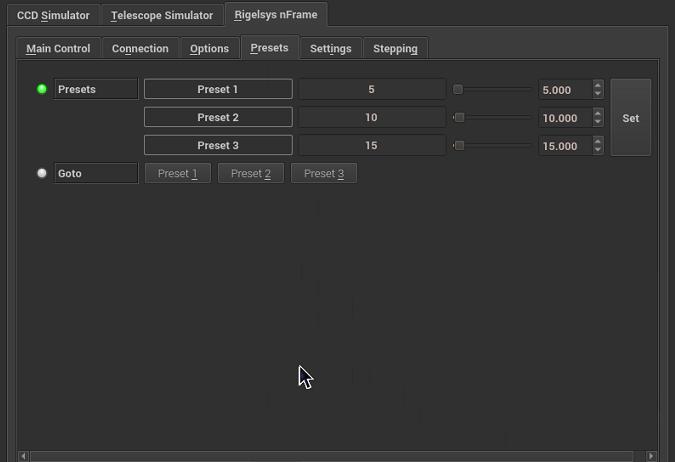
Allows the user to pre-define specific rotation values then click one of the Pre-sets to move to that angle.
Settings

Allows the user define the number of steps per degree of rotation.
Stepping Settings
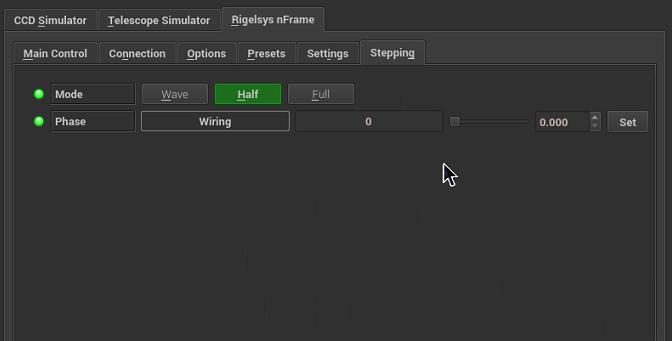
Controls the stepping mode and phase.
o Wave: Wave Stepping Mode.
o Half: Energizes 1 or two coils at a time, doubling step resolution.
o Full: Highest power mode, two coils always energized.
- Phase Select: set to 0 for usb-nFrame. Can be used for any possible phase wirings. Allow a person to wire the phases in any order then chose one of 3 settings in software to drive them.

{kind=link}