INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Driver OnStep (LX200 like) for INDI

Replied by Spas Sl on topic Driver OnStep (LX200 like) for INDI
I updated the firmware on my controller, modifying the #define GUIDE_TIME_LIMIT value to 40, and it seems to have resolved the issues with slewing and polar alignment. However, I'm not sure if the values for #define AXIS1_STEPS_PER_DEGREE and #define AXIS2_STEPS_PER_DEGREE are correct, so I obtained them from the web interface. I plan to conduct some tests to verify the accuracy of these values.
Please Log in or Create an account to join the conversation.
- Alain Zwingelstein
-

- Offline
- Elite Member
-

- Posts: 452
- Thank you received: 71
Replied by Alain Zwingelstein on topic Driver OnStep (LX200 like) for INDI
Concerning AXIS1_STEPS_PER_DEGREE and AXIS2_STEPS_PER_DEGREE,
it a value that is calculated based on:
motor STEPS (most probably 400)
chosen µSTEPS (usually 32)
gear RATIO (depends on your mount, is the ration between motor and worm)
and WORM (depends on mount, is the number of rotations of the worm for 360°)
STEPS_PER_DEGREE = (STEPS * µSTEPS * RATIO * WORM)/360 (in spreadsheet)
Best to do is to create a Config file and compare the values
Use this spreadsheet baheyeldin.com/sites/baheyeldin.com/file...tep-Calculations.xls
and then use the online configurator: o.baheyeldin.com:1111/
but in principle the values in the config file should be right.
Can you please share with others the procedure you followed to flash the firmware!
Screen shots are welcome
Please Log in or Create an account to join the conversation.
- Andrew Rankine
-

- Offline
- New Member
-

- Posts: 12
- Thank you received: 0
Replied by Andrew Rankine on topic Driver OnStep (LX200 like) for INDI
This is strange territory for me.
cheers
Andrew
Please Log in or Create an account to join the conversation.
- Alain Zwingelstein
-
- Offline
- Elite Member
-
- Posts: 452
- Thank you received: 71
Replied by Alain Zwingelstein on topic Driver OnStep (LX200 like) for INDI
It seems Spas did at least solve the slewing issue .
When it come to share the procedure to flash a firmware to the "Terrans" controller there are several things to say:
1) The Procedure to set the jumpers on the "Terrans" controller is described by "Terrans" (see their Download page)
2) The procedure to flash is also described by "Terrans" in the same location
3) The procedure on howto modify the sources, compiling and flashing is out of the scope of this forum.
4) People willing to learn howto about onStep are invited to read the Wiki at onstep.groups.io/g/main/wiki/15166
Please Log in or Create an account to join the conversation.

Replied by Ettore on topic Driver OnStep (LX200 like) for INDI
I must try when clear sky.
Ettore
Please Log in or Create an account to join the conversation.
- Alain Zwingelstein
-
- Offline
- Elite Member
-
- Posts: 452
- Thank you received: 71
Replied by Alain Zwingelstein on topic Driver OnStep (LX200 like) for INDI
The GUIDE_TIME_LIMIT parameter is not hardware related so must have the same effect on operation whatever controller you have.
Please Log in or Create an account to join the conversation.
Replied by Ettore on topic Driver OnStep (LX200 like) for INDI
// GUIDING BEHAVIOUR
see onstep.groups.io/g/main/wiki/Configuration_Mount#GUIDING
#define GUIDE_TIME_LIMIT 0 // 10, n. Time limit n=0..120 seconds. Use 0 to disable. Adjust
#define GUIDE_DISABLE_BACKLASH OFF // OFF, Disable backlash takeup during guiding at <= 1X. Option
And try as soon as possible.
Ettore
Please Log in or Create an account to join the conversation.
Replied by Spas Sl on topic Driver OnStep (LX200 like) for INDI
The firmware update procedure is straightforward. As far as I know, the board is nearly identical to the MaxESP Version 3, so we can use its instructions. I will outline my procedure below. I have only tested the mount control and guiding since I don't plan to use the focuser and rotator capabilities.I tested the procedure only on Terrans Pro board!
I've placed all the necessary files in the following link:
drive.google.com/drive/folders/1-4CYK5T9...nSzOEJJKWHxmAypjo3_N
If something goes wrong, we can restore the original firmware using the ESP32 flash download tool, which is located in the same folder. I've tested this process many times without any issues but use it at your risk!
To update the firmware via the Arduino IDE, follow these steps:
1. Install Arduino IDE.
2. In the Arduino IDE, go to File > Preferences, and add the following URL to the "Additional Boards Manager URLs" box:
raw.githubusercontent.com/espressif/ardu...age_esp32_index.json
3. In the Arduino IDE, navigate to Tools > Board > Boards Manager and install the ESP32 support. I installed version 2.0.0.0.
4. Go to Sketch > Include Library > Add .ZIP Library, and browse to install 'DFRobot_SD3031-master.zip,' which is responsible for the RTC module.
5. Download and unzip 'OnStepX_1.zip.'
6. Open the Arduino IDE, go to File > Open, and select the 'OnStepX' folder. Then, open 'OnStepX.ino.'
7. In the 'Config.h' file, make the following modifications according to your preferences:
// I'm not sure if this is necessary
#define SERIAL_B_ESP_FLASHING ON
// Obtain these values from the Web Server before flashing:
#define AXIS1_STEPS_PER_DEGREE 3840
#define AXIS1_DRIVER_MICROSTEPS 16
#define AXIS2_STEPS_PER_DEGREE 3840
#define AXIS2_DRIVER_MICROSTEPS 16
#define GUIDE_TIME_LIMIT 40
#define TRACK_AUTOSTART ON
8. In the Tools menu, select the following options:
Boards: ESP32 Dev Module
CPU Frequency: 240MHz
Partition Scheme: Huge App
Port: Choose the device's USB serial port (the one that appears only when you plug in the USB cable going to the controller.)
9. Click the "Verify" button (the green checkmark icon).
10. If there are no errors, click "Upload."
11. When the "Connecting.............." message appears, hold the ESP32 button and briefly press the EN button. After the procedure completes, release the button and restart the device.
12. Connect to the board via INDI and verify communication.
Please Log in or Create an account to join the conversation.
Replied by Spas Sl on topic Driver OnStep (LX200 like) for INDI
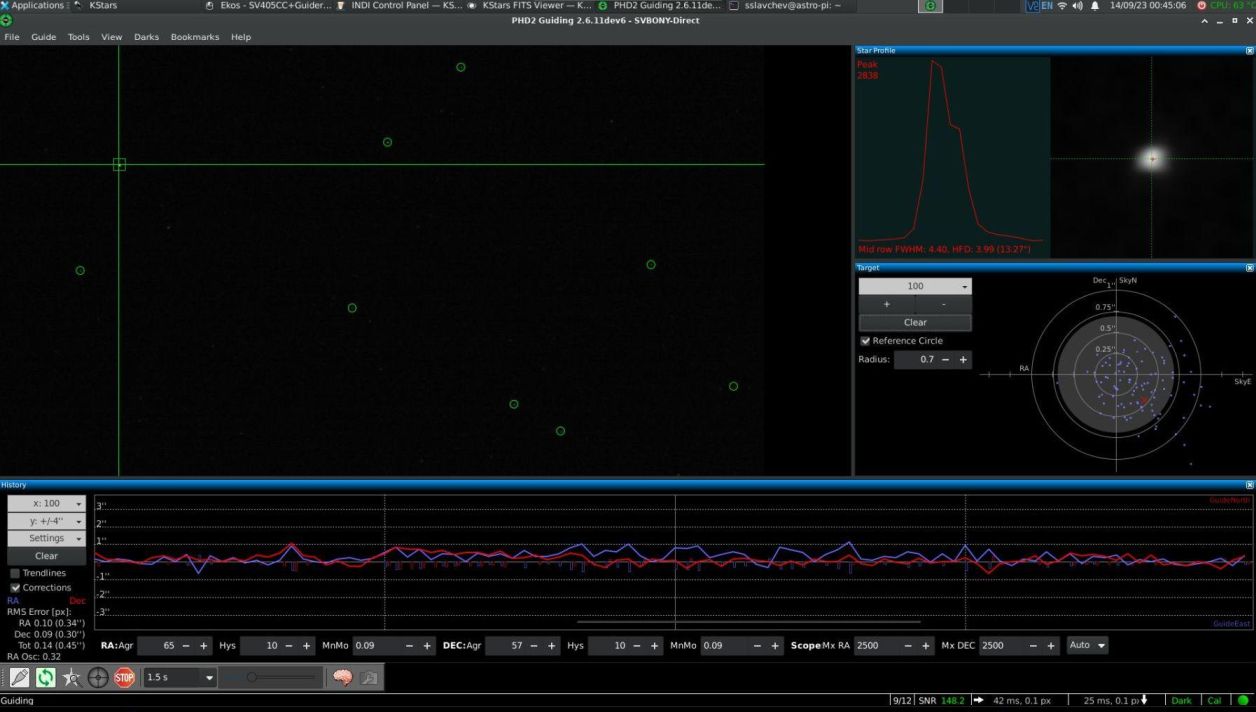
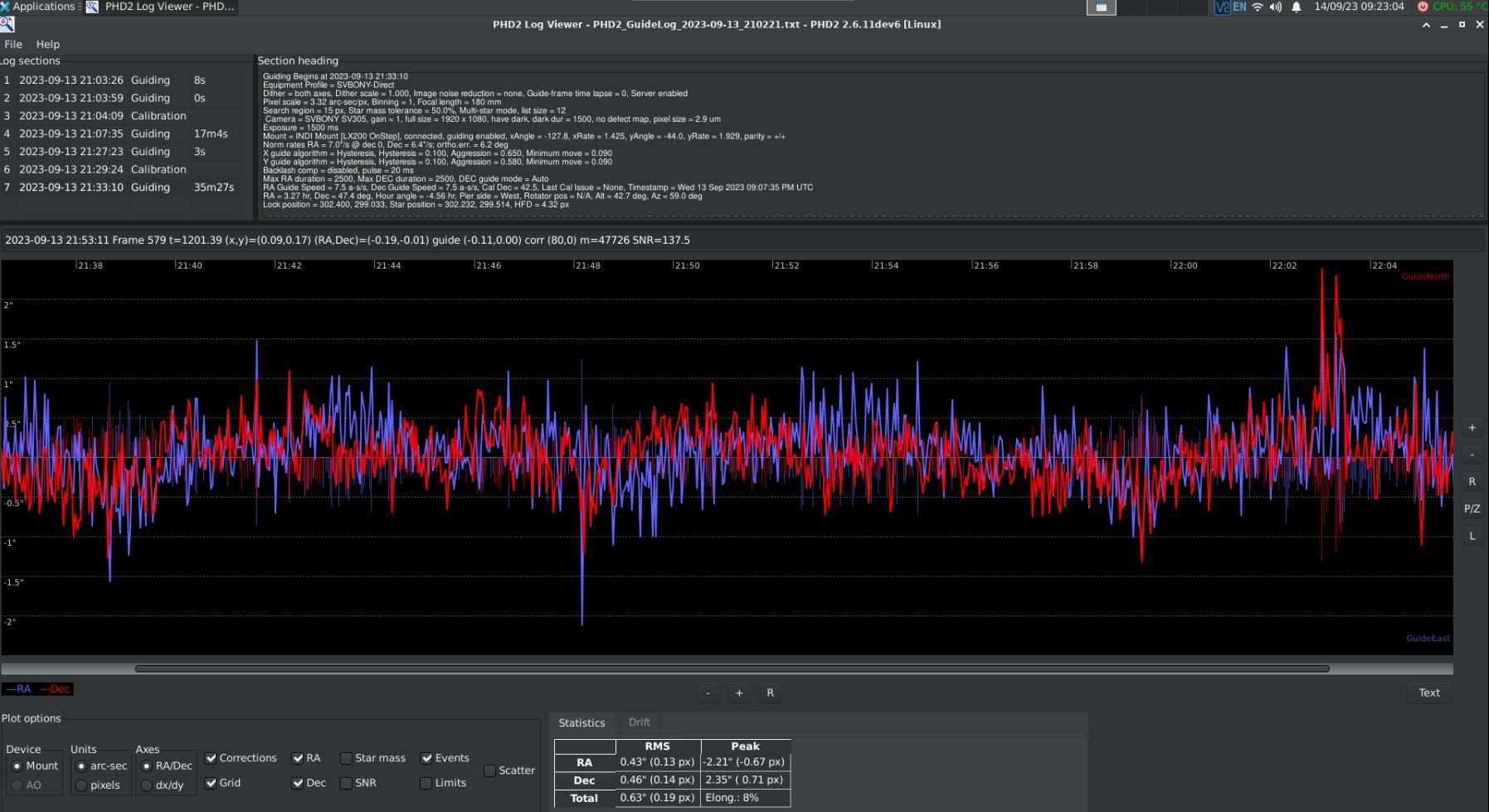
I captured numerous 120-second frames with my Celestron C8 using a Starizona x0.7 reducer (1430mm focal length), and all of them had rounded stars. The RMS ranged between 0.45 and 0.7. I guided the setup with a 50mm guider. I achieved similar results with my ZWO AM5 mount:).


Please Log in or Create an account to join the conversation.
- Alain Zwingelstein
-
- Offline
- Elite Member
-
- Posts: 452
- Thank you received: 71
Replied by Alain Zwingelstein on topic Driver OnStep (LX200 like) for INDI
That will hopefully help people to solve some issues with the "Terrans" controller by themselves.
You are right, OnStep is a great job and we can thank you Howard and all the active members on OnStep Forum .
It required quite a lot of skills starting from electronics to software development and mechanics and many others.
Please Log in or Create an account to join the conversation.
Replied by Spas Sl on topic Driver OnStep (LX200 like) for INDI
Regarding the Terrans EXOS2 Lite version, I conducted some experiments.
I tested updating the firmware via the ESP32 download tool using Lite.bin just to ensure that I have a recovery plan. I disassembled the Lite version and found out that the drivers are TMC2225S. I made some changes in Config.h and updated the firmware via Arduino IDE. The device seems to be working as expected, but I will conduct some tests on stars before confirming.
These changes need to be made in the config for Lite - EQ5/CG5 mounts:
#define AXIS1_DRIVER_MODEL TMC2225S
#define AXIS1_STEPS_PER_DEGREE 7680
#define AXIS1_REVERSE OFF
#define AXIS1_DRIVER_MICROSTEPS 32
#define AXIS2_DRIVER_MODEL TMC2225S
#define AXIS2_STEPS_PER_DEGREE 7680
#define AXIS2_REVERSE OFF
#define AXIS2_DRIVER_MICROSTEPS 32
#define AXIS3_DRIVER_MODEL OFF
#define AXIS4_DRIVER_MODEL OFF
#define FEATURE1_PURPOSE OFF"
The required button combination is to press P2(held) + EN (short click).
EDIT:
The Bluetooth virtual device is not enabled by default in this source so enable it in Extended.config.h, line 37:
#define SERIAL_BT_MODE SLAVE
Best regards,
Spas
Please Log in or Create an account to join the conversation.
- Alain Zwingelstein
-
- Offline
- Elite Member
-
- Posts: 452
- Thank you received: 71
Replied by Alain Zwingelstein on topic Driver OnStep (LX200 like) for INDI
Thanks for the information.
This means that (except you discover some strange behavior) "Terrans" firmware can be compiled and uploaded with the Arduino IDE provided one makes the correct changes to the Config.h files to match the hardware of the particular controller.
Now the question is: Can we use the official firmware also?
So far I did check I made a "diff -r" on the src directory and found no changes between "Terrans" version 10.17.f and rollback of official version 10.17.f
today 15/09/2023 we have this situation form a version point of view:
OnStepX version: = 10.17.j
OnStep version: = 4.24.s
SmartWebServer version: = 2.06.j
SmartHandController version: = 4.00.f
Terrans OnStep version: = 10.17.f
Terrans SmartWebServer version: ???? (source not available)
I will ask Terrans again t have the sources available on their site (the complete project is GPL V3 licensed so they have to disclose their sources) as they have to disclose their Schematics.
Please Log in or Create an account to join the conversation.