
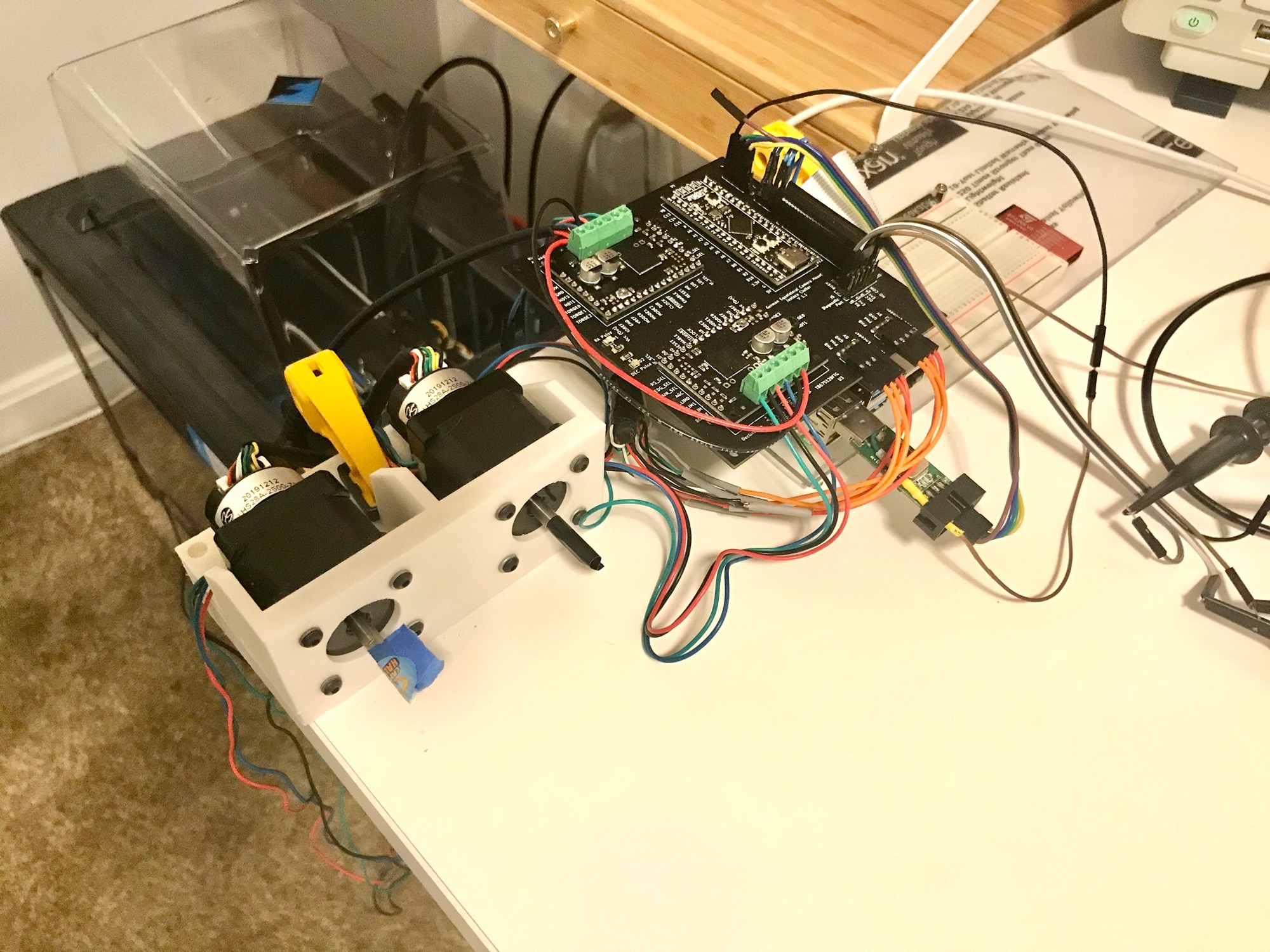
So I have been kicking around a project to make a custom German Equilateral Mount for my camera. I was kind of using the iOptron designs as a reference. So far, I have two stepper motors, with encoder feedback, connected to a custom circuit board with a STM32F411 driving two Pololu stepper controllers. I have a basic command and control via SPI with an RPi 4. Here is an image of my current setup:
Right now I am a bit confused as to the full approach. Ideally I would like to have KStars drive this and be my interface to my camera and my custom mount. Based on my reading, this is what I think the setup should be:
Rpi hosts an INDI server which is configured for the Canon DSLR (I have an unmoved 7D MKII) driver and then either a custom driver for my custom board or to use the EQMod driver and write an intermediate interface to simulate the right interface between my custom hardware and then EQMod driver.
I can then use my laptop, possibly remotely across wifi, to run KStars and connect to the RPi's INDI server?
When I was looking at the different drivers, I fell onto the EQMod driver because it looked very feature complete. (position calibration solver builtin which sounded great). But maybe that is very outdated and a bad choice?
As I am early in the project, I have a lot of flexibility right now. Any help on how I can interconnect all of these elements would be great. Thanks for any feedback.
Read More...
© 2003-2022 by INDI Library. All rights reserved.