INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Poor guiding results with Losmandy mount

Replied by Len North on topic Poor guiding results with Losmandy mount
Attachments:
Please Log in or Create an account to join the conversation.
- Bill Tschumy
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

- Posts: 102
- Thank you received: 11
Replied by Bill Tschumy on topic Poor guiding results with Losmandy mount
Thanks for the confirmation that something is amiss with Losmandy/Gemini guiding. If the Ekos built-in guiding used to work and now it doesn't, there must have been a change that the Gemini system doesn't like. Hy, are you the person maintaining this code? I would be happy to try to trouble shoot with whoever is in charge of it.
Yesterday I switched out my older GM8 mount to my newer G8/11. Looks like I won't have clear skies until next Monday or Tuesday. I will see if I still have the same issues with calibration not working well with Ekos but doing okay with PHD2.
Bill
Please Log in or Create an account to join the conversation.
- Hy Murveit
-

- Away
- Administrator
-

- Posts: 1224
- Thank you received: 566
Replied by Hy Murveit on topic Poor guiding results with Losmandy mount
I do maintain the guider, though I'm not as expert on things like mounts and mount drivers. Anyway, happy to help with what I can.
Hy
Please Log in or Create an account to join the conversation.

Replied by Alfred on topic Poor guiding results with Losmandy mount
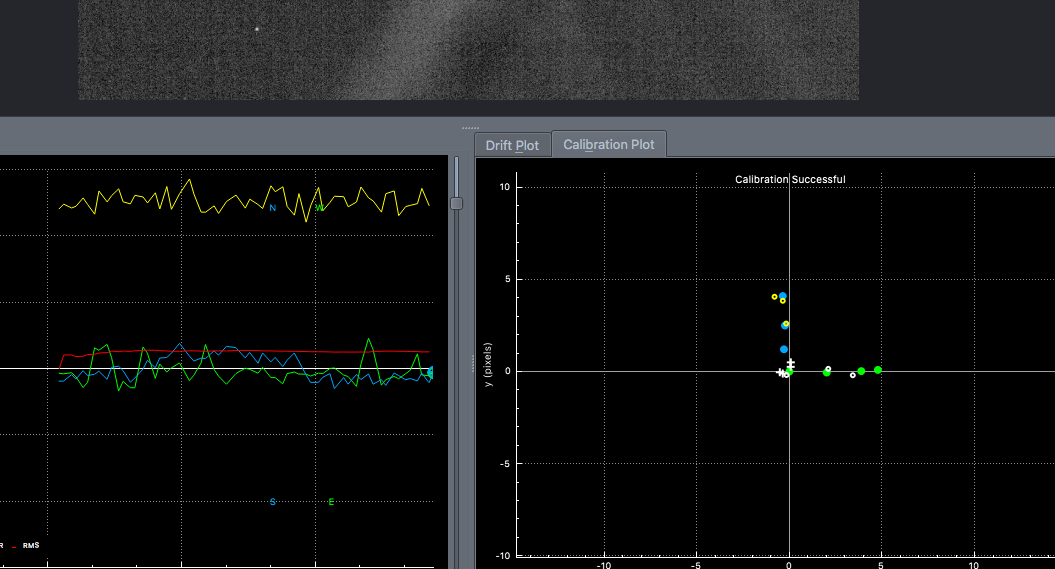
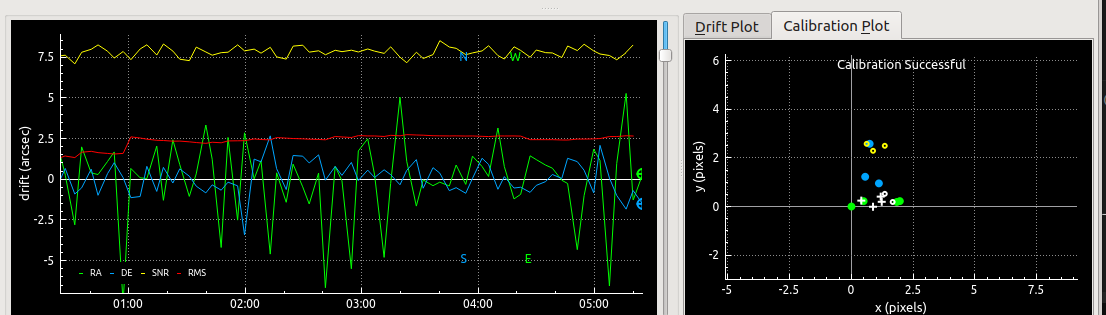
Calibration
Guiding
Conditions were very bad, I had to chase stars through clouds, check out the SNR graph! Guide stars were barely visible.
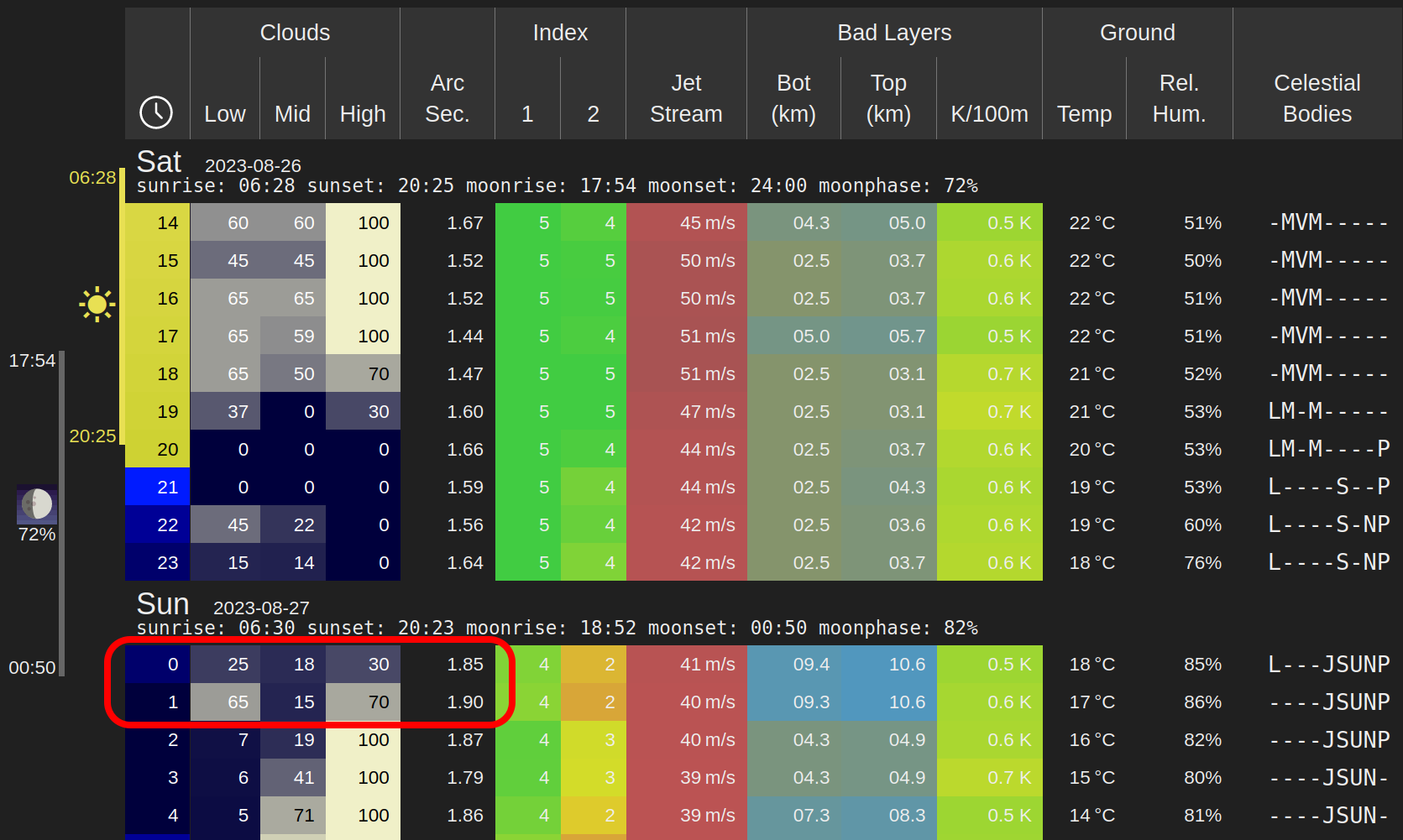
This was on an old standard G-11 Gemini-1 Level 4, V1.04 (no high precision or spring loaded worms) running Indi v2.0.3-7 and KStars Build: 2023-08-21T23:32:48Z on Kubuntu 23.04.
Attachments:
Please Log in or Create an account to join the conversation.
Replied by Alfred on topic Poor guiding results with Losmandy mount
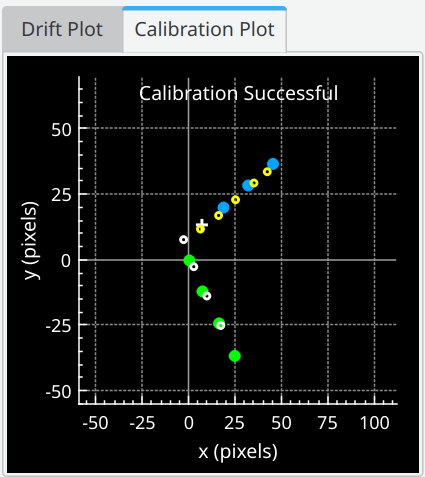
This makes sense in your case. This
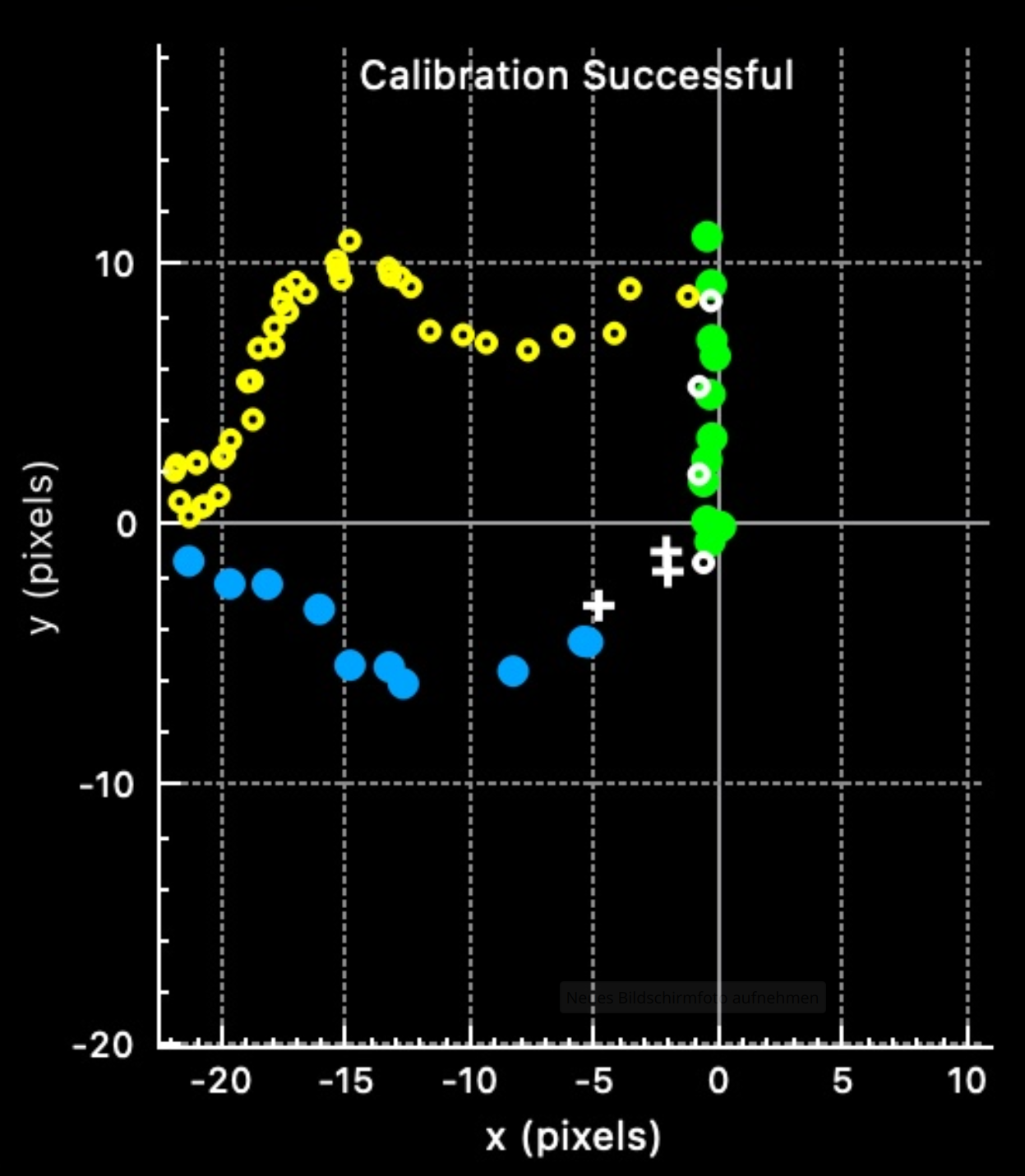
is one of your calibration plots. It shows an uneven behaviour in both axes. I assume the green dots represent RA out movement. It takes RA ca. 11 pulses out and just 4 pulses in to cover the same distance. The guider derives the pulse length/arc sec value from the out movement and during guiding applies it in *both* directions which leads to massive over-correction in "RA in" direction as it would require much shorter pulses (4/11) than the guider "believes". What you'll notice is the gravity center of dots in the drift plot is shifted.
This is where integral gain comes into play. Integral gain controls how much the average of previous errors is weighted into the computation of the guide pulse. Since the everage of previous errors is on the RA in side, integral gain will add an extra compontent in RA out direction to all RA correction pulses which leads to better overall performance.
Similar issue in DEC.
Guiding should improve massively if calibration would measure pulse length/arc sec in all 4 directions instead of just 2 and apply distinct correction pulses accordingly. In theory they should be the same anyway. In practice, they are not. BTW, did you try ST-4 guiding by adding the cable and setting "Guide via:" to your guide cam in Optical Trains?
Attachments:
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Away
- Administrator
-
- Posts: 1224
- Thank you received: 566
Replied by Hy Murveit on topic Poor guiding results with Losmandy mount
Guiding should improve massively if calibration would measure pulse length/arc sec in all 4 directions instead of just 2 and apply distinct correction pulses accordingly.
I would be very surprised if your claim is accurate. I did not create this policy, it pre-existed my involvement in KStars, but I've maintained it when I could have changed it. Note that PHD2 does the same thing (only calibrates on the outward movements). See the bullet entitled "Too Little East or South movement" here: openphdguiding.org/man/Trouble_shooting.htm
I imagine this policy is implemented to mitigate the effects of backlash on the calibration measurements.
Hy
Please Log in or Create an account to join the conversation.
Replied by Alfred on topic Poor guiding results with Losmandy mount
I realize it's always been this way and PHD does it the same way, too. This doesn't mean it's the most sophisticated approach possible. IMO Bill's case is a good example of why and how guiding could profit from additional measurements. The reality is It takes his mount 11 pulses to move RA out but (a little less than) 4 pulses to move RA in. This is not backlash-related. Backlash shouldn't play any role in RA as no real change in direction happens. The worm keeps moving in the same direction at all times, at varying speeds. If in Bill's case the guider would apply a factor of 4/11 to all RA in pulses this would compensate for the irregularities, wouldn't it?
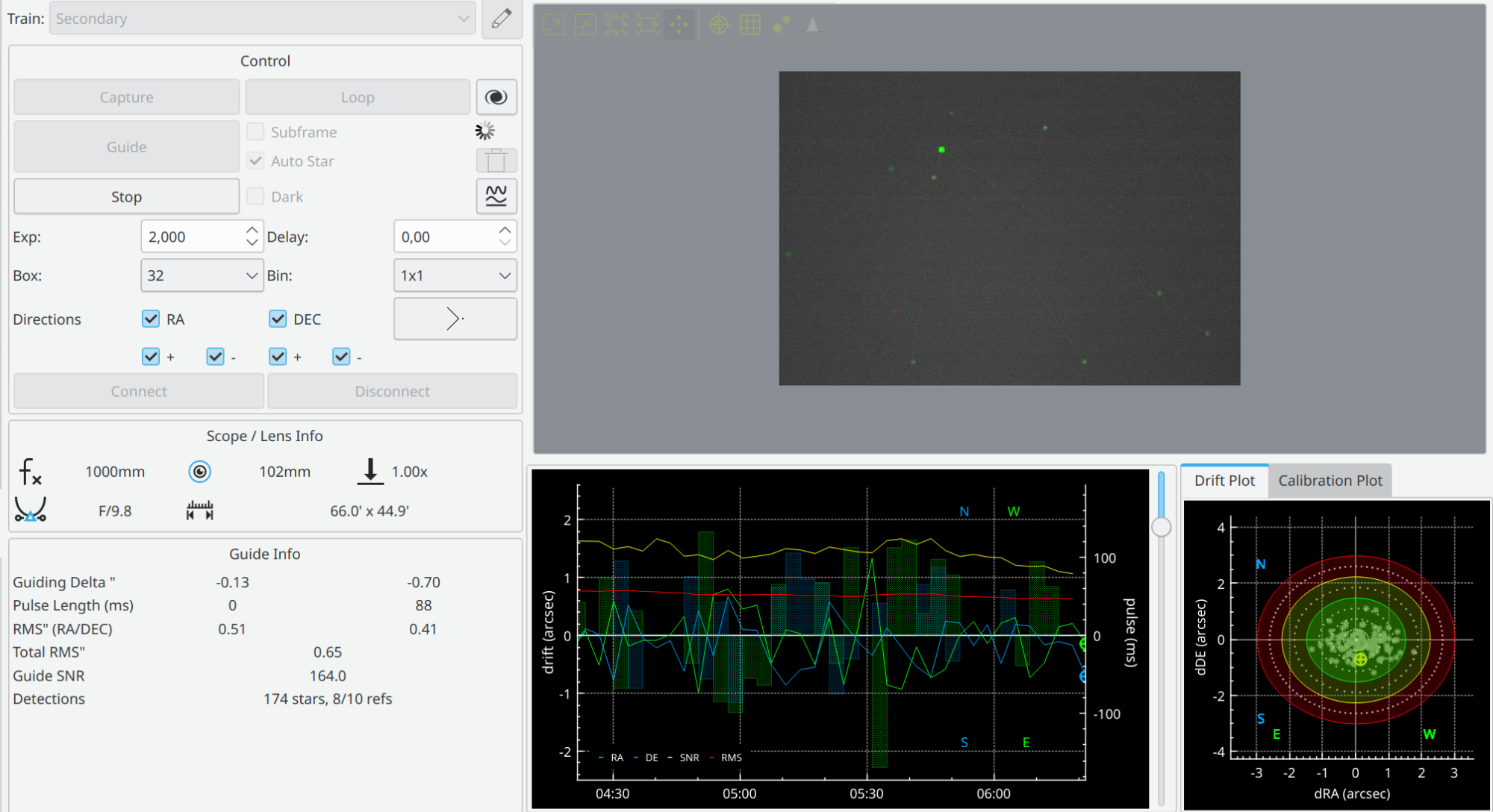
In any event, I achieved RMS of 0.65 in awful conditions so neither the guider nor losmandy driver suffer from issues that would prevent them from doing their job.
Please Log in or Create an account to join the conversation.
Replied by Alfred on topic Poor guiding results with Losmandy mount
Currently he sets integral gain to 1 which adds a component in "RA out" direction to all pulses (this has a similar effect as trimming "RA in" pulses by a factor of 4/11) and reports better results compared to integral gain = 0. His experience points towards possible improvements.
Unfortunately integral gain applies the "RA out" addition to all pulses while the correction needs to be applied to "RA in" movements only. This is why I'd expect 4-way calibration to enhance guiding performance further.
Please Log in or Create an account to join the conversation.
Replied by Len North on topic Poor guiding results with Losmandy mount
I have observed a mathematical error and it's not from KStars / Ekos so you can breath easy Hy. I put my Gemini mini and two motors on a bench test with no computers in sight.
Now this is the setup that was sent back to me with the latest level 6 update, In fact, I believe my Gemini was used in the developing that update, but I was noticing issues while tracking the moon 2 nights ago.
RA tests were all fine with a RA Divisor of 448770 and Dec Divisor of 0
DEC had appeared OK but when I selected Lunar tracking the Dec Divisor was now 23,225,329. This is much slower and with the lightest finger touch on the end of the gear, the motor started to get small shudders and only advance on about one pulse out of three. At the same time the Handbox RA and DEC numbers kept incrementing. It appeared to be normal even though the motor was not advancing reliably.
Ironically, in late June 26 I was critical of Gemini L6 mods as they replaced the absolute lock (or sync) between electrical input and encoder count output with a mod that allowed for uncounted pulses during stall conditions, and there was a complete lack of torque. The July mod has fixed the torque issue but it has not returned the motor to the previous state where it had multiple turns of tolerance (if stalled for some reason) and then return to absolute lock again.
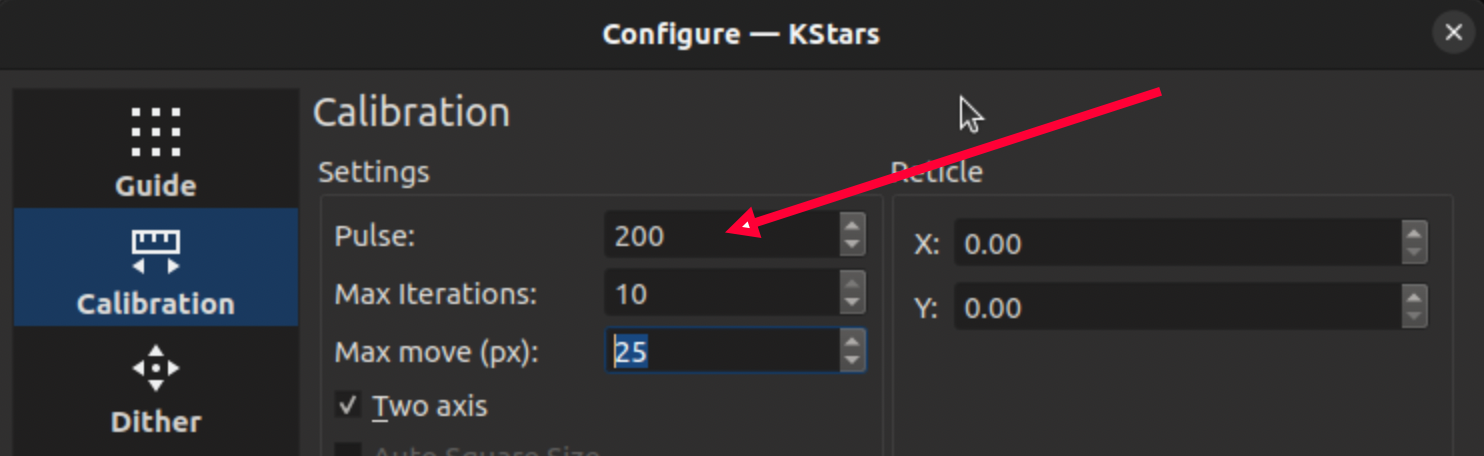
Small steps may be the guide calibration issue. If Hy can please tell me how to increase these steps, I can determine the effect of those larger steps on my calibration.
Thanks
Len
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Away
- Administrator
-
- Posts: 1224
- Thank you received: 566
Replied by Hy Murveit on topic Poor guiding results with Losmandy mount
Attachments:
Please Log in or Create an account to join the conversation.
Replied by Len North on topic Poor guiding results with Losmandy mount
Please Log in or Create an account to join the conversation.
- Bill Tschumy
-
Topic Author
- Offline
- Premium Member
-
- Posts: 102
- Thank you received: 11
Replied by Bill Tschumy on topic Poor guiding results with Losmandy mount
However, I do believe I found the culprit for why my Dec calibration was inconsistent. It looks like there was some slop in the Oldham coupler between the Dec motor and the worm. This doesn't feel like backwash when you wiggle the mount in Dec so I thought I had minimal Dec backlash. I have tightened that up and tonight is supposed to be clear. I will directly compare the built-in guiding against the PHD2 guiding and report back tomorrow.
Please Log in or Create an account to join the conversation.