



I am using indi, but not kstars. I leverage low level indi primitive from a custom software platform, here you can see an example of the mqtt client: github.com/gnthibault/RemoteObservatory/.../PanMessagingMQTT.py
It is a quite specific case, in the general case, I would use @ rkaczorek mqtt bridge. At the time I decided not to use it because from what I remember it was relying on pyindi which was not really well maintained at the time. It is probably much better now
Read More...
Dear all,
I have actually reported thé issue hère: github.com/indilib/indi-3rdparty/issues/822
Basically there seems to bé an initialization issue with thé camera, that fails tobstart properly quitte often depending on thé way it has been poweresld/unpowered.
I am actively looking for other users of this caméra to unferstand if thé issue I reported Can bé reproduced with other caméras of thé same model
If you have this caméra I would bé good to hère from you about thé behaviour of thé camera when powering 12V first for instance.
Thanks you in advance for your help.
Read More...


I am very much interested in this device as well, anyone has tested it ? In particular the "localized" cloud detection ?
Read More...
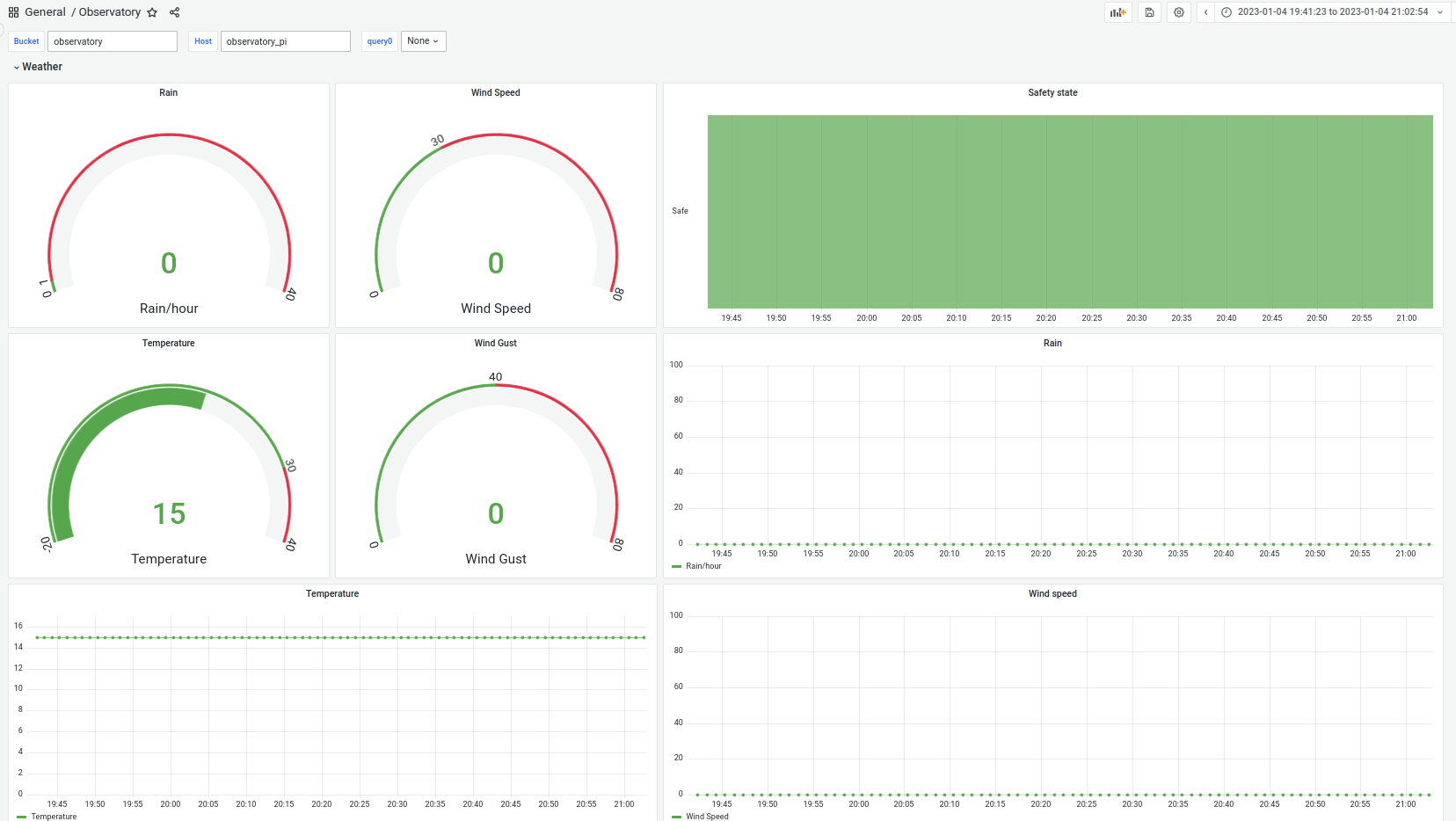
This is not a direct answer to your question, but I am developing a robotic observatory management software in python (that includes an full python indi client), and broadcast some information on mqtt topics.
My full stack includes mosquitto, telegraf, influxdb, and grafana, I personally use grafana to monitor the observatory, but from what I know, HA can also query influxdb with flux query in a very similar way telegraf does.
That's a potential idea for you if used together with infi-mqtt from @rkaczorek

Read More...
Hi folks.
I recently came across this issue while trying an automation scenario.
The focuser simulator was not able to change the focus of the Guide Simulator camera, even if there was focuser simulator in the list of snoop device.
I was wondering if it was possible either to instanciate a guide simulator that would have a proper focusing curve, or to instanciate two ccd simulator on the same server.
Thank you in advance for your help
Read More...
Nice, thank you very much for your answer, I didn't know the command "indi_setprop" existed, this is quite handy for debugging !
I am using a custom python implementation of indi client (not the official pyindi, that I stopped using a while ago because of poor maintenance status).
Actually I realized what was the issue, and it was not related to the lx200 mount driver implementation.
I was sending 2 TARGET_EOD_COORD set in a row, without waiting for the end of the goto.
What happened is that I was received a TELESCOPE_ABORT_MOTION switch, and the TARGET_EOD_COORD was set to IDLE value (instead of the BUSY I expected).
I fixed my script and now everything is working as expected
Read More...
Dear all,
I used to go check the following documentation to undersand basic propoerties of cameras/telescope and write scripts for my equipments
indilib.org/developers/deveioper-manual/...s.html#h3-telescopes
Recently, I found myself in trouble while someone tried to used a piece of software I used, that contained a simple "goto".
In practice the goto amounts to do that:
set number 'EQUATORIAL_EOD_COORD' to specified value
wait until EQUATORIAL_EOD_COORD light goes from IPS_BUSY to something else (either IPS_ALERT or IPS_OK)
Usually, for instance in the simulator, the light goes to IPS_OK when the slew is over, and the telescope is at the desired psition.
Relevant code for this behaviour can be found there:
github.com/indilib/indi/blob/6bae059fd24...ditelescope.cpp#L877
However, for lx 200 based driver, it looks like the behaviour might be different, but this is not 100% clear to me:
github.com/indilib/indi/blob/22718d728fa...00telescope.cpp#L402
It looks like the IPS_BUSY has been commented out, and instead, the TrackState (from enum TelescopeStatus) is updated. Unfortunately, from what I know, the TelescopeStatus is not exposed as either a read-only switch or something else, making it impossible to synchronize properly on the end of the slew.
Am I understanding the issue correctly or not ?
Thank you in advance for your help.
Best regards
Read More...
Client is on a x86 laptop and server/driver on a 4GB SBC ~30% more powerful than a rasbperrypi4 (rock64pro from pine64). I tried with 8bit and lowest resolution but didn't get better results unfortunately. But the outcome seems more or less random, I will try to reduce the potential source of errors in my next attempt, IE, much better network, changing usb cable, etc...
Read More...
I tried changing the auto-exposure (enabled by default ?) in the controls tab.
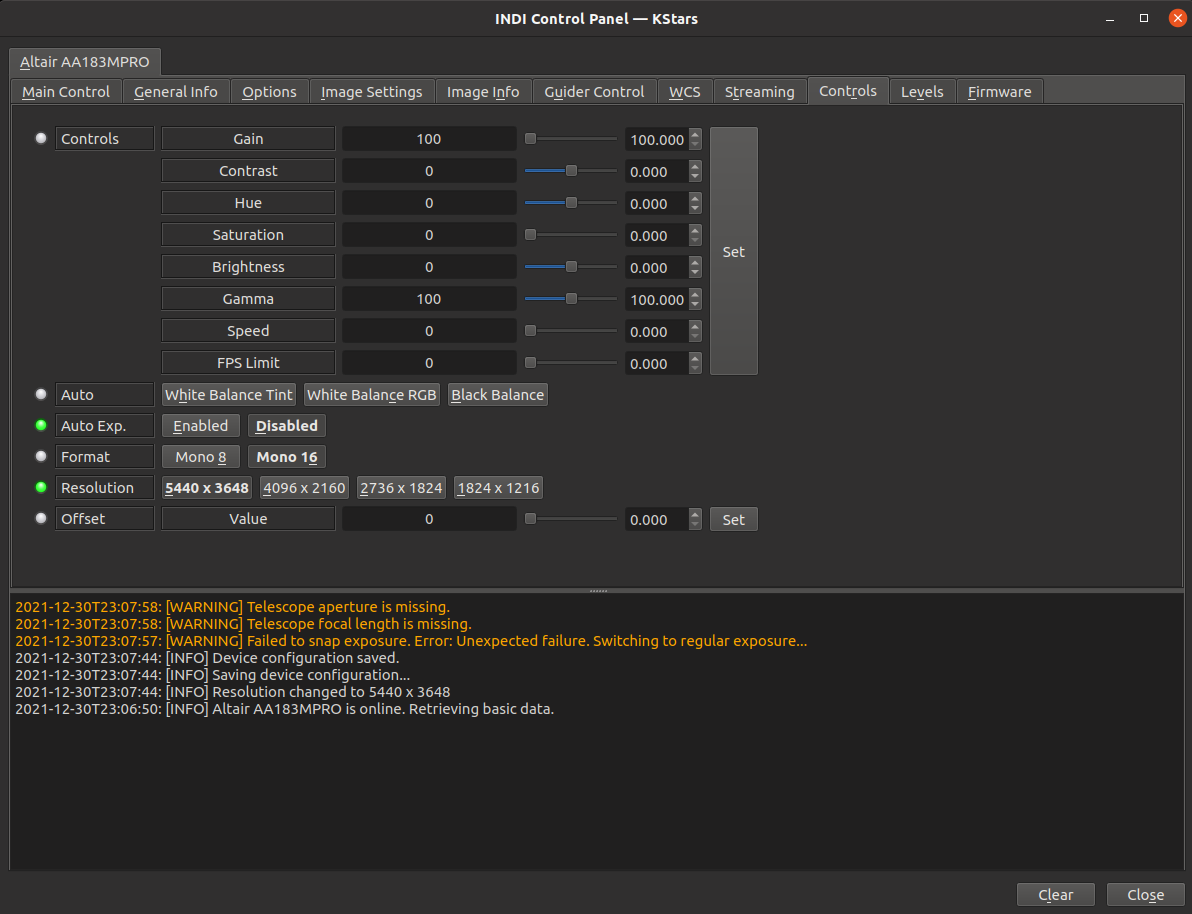
I also played with the resolution option, but I guess weird behaviour ranging from, getting an image after a very long time, to driver disconnection + getting the client interface reseted for the camera.
Nothing more than the previous logs are shown in those cases unfortunately... It is really a shame that the driver is that bad with regard to the consistent behaviour I have with ZWO ASi cameras.
Read More...