
Hi. Apologies if this is too noob to be appropriate here, but seems like it might be an important thing to focus on for getting started, i.e. not "crashing" your mount is probably a good idea right at the beginning.
I see a parameter for setting a limit so you don't crash your drive, but it's not intuitive I guess because I can't figure out what numbers should be entered. There are a lot of coordinate possibilities on that same page, but none of them correspond to the "Min Alt." or "Max Alt." values that show on the page. Or at least it's not connecting in my mind. They are hours & minutes instead of degrees to start with, so I don't think I'm looking in the correct place.
I figure I'd want to set the home position to essentially where the telescope points at the CP and the scope/weight axis vertical so I did that first. Then I swung the mount to either side close to where I want the limit to be and wrote down all the coordinate values from the left side of the mount tab. The HA is the only thing that changes but the numbers don't make sense to me. Can anybody help me here?
Kind of related but maybe on a tangent, I'd like the "Park" position to just be the same as the home position and I set that to happen once, but I was just poking at it and it was a bit of an accident really. But every time I restart the Pi, the park position is somewhere completely else and clicking "Park" always moves the telescope around such that I have to manually abort otherwise it will crash the mount into the base, which is kind of the exact opposite of what I'd want "Park" to do.
Anyways, getting this set up to control my mount remotely without the fear that it could crash and start stripping gears seems like an important first step I'd like to safely configure really early in the process. I seem to be getting nowhere with it, so any guidance would be appreciated.
I've attached a pic of the screen I'm thinking I need to set this. Maybe I'm not even in the correct place?
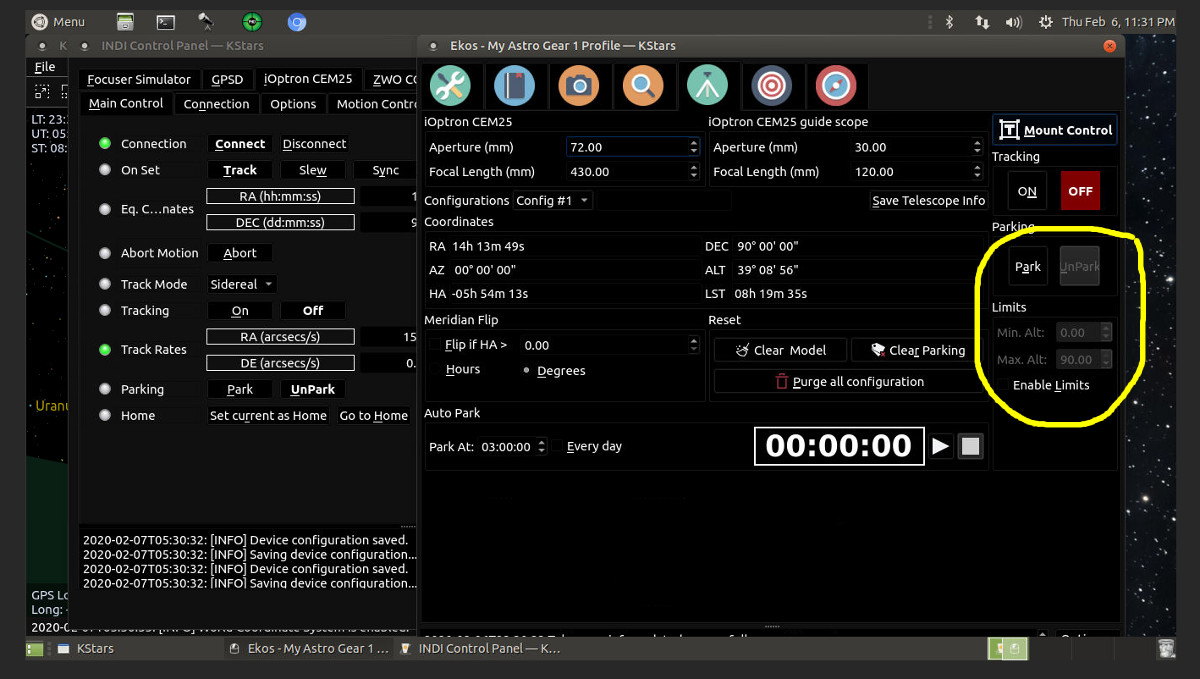
Read More...