


Hi Keith,
Click on logs and then set the settings I circled in red...
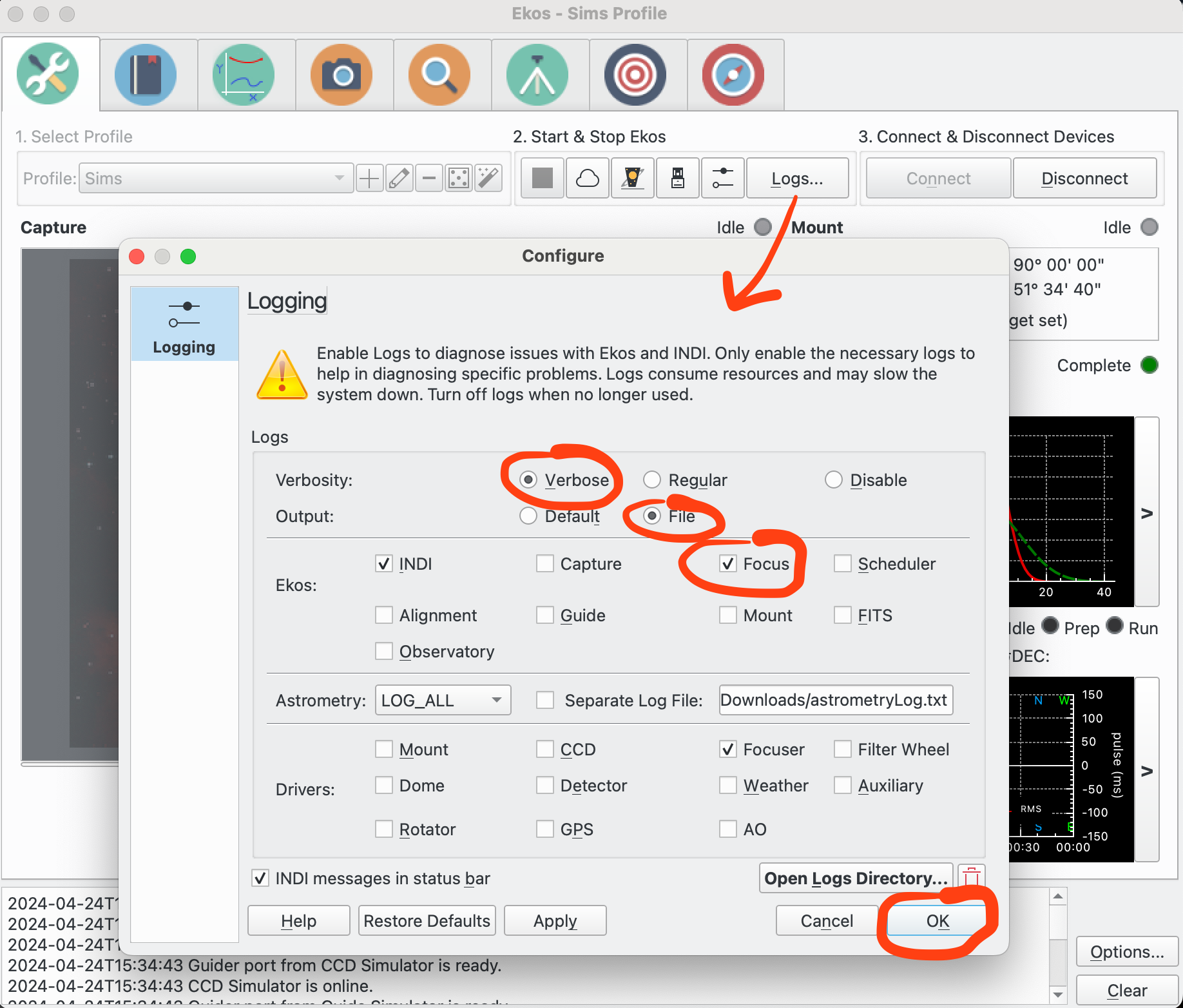
The Open Logs Directory button (bottom right) will launch a file manager / file explorer / etc in the logs directory so you can then send the relevant (date-timestamped) file.
I suppose the only thing I noticed from your screenshots is that you have a step size of 200 which on some systems will be too big and may take you outside the range at which stars are detected. I don't know if that's the case on your equipment but be aware with number of steps = 11 and step size = 200 you'll move 1000 ticks out to take the first datapoint.
Read More...
Hi Pramod,
Be good a log (with Verbose+Focus set) when you get another chance.
One thing I've noticed is that sometimes when no stars are detected the graph point will have an HFR = -1 and the graph doesn't always rescale to show the -1 (not sure exactly why) so it looks like the point is just missing (unless you manually drag the -1 into view).
Read More...

Hi Keith,
I thought I'd fixed all instances of focus not reseting properly which is probably what you're referring to. Of course its possible there's a case I've missed or you could be on an old version of kstars?
Read More...
None = no guilding
Mount = guilding images are sent from the guide camera to the computer running the Guide module / PHD2. Guide / PHD2 works out pulses to move the mount to keep the guide star(s) in the correct position and sends from the computer directly to the mount. So there needs to be a connection from the computer running guiding to the mount. This is usually called pulse guiding.
Camera = guilding images are sent from the guide camera to the computer running the Guide module / PHD2. Guide / PHD2 works out pulses to move the mount to keep the guide star(s) in the correct position and sends from the computer back to the guide camera. The Guide camera sends the pulses to the mount so there needs to be a connection from the Guide camera to the mount. This is called ST4 guiding.
ST4 was the original way to do guiding. Pulse guiding is now the usual way as it involves 1 less connection (guide cam to mount) and 1 less hop for the guide pulses to have to make.
Read More...
Hi Keith,
There are a number of reasons why you might get this error. For me to be more helpful you'd need to post of the log with verbose Focus logging set on. But here are some thoughts in the interim...
You imply sometimes Focus was working, sometimes there were issues so seems to be an intermittent problem. You also mention you could make out stars in the frames where Focus was saying no stars were detected. This would fit with some sub-optimal parameter settings that work some of the time but not always.
You could post screenshots of the parameter settings and I could comment on those. Alternatively, you could run FocusAdvisor and let it update your parameters. Usually FocusAdvisor will pick a reasonable set of parameters for most systems that will minimise the sort of problem you have.
Read More...
Yes, you're right about the Manual Filter. There is an Indi config option for max filters but when I played around changing that >5 it didn't seem to work.
Another option would be to try the Filter Simulator which has 8 filter slots (but different functionality).
Read More...
Hi Frederick,
Sounds like something's wrong. I would suggest deleting and recreating the optical trains (and checking all the parameters are how you want them).
A way to see the focal length that Focus uses is to hit "CFZ". The popup displays the focal length for the selected Optical Train. It will factor in any reducer in the OT.
HTH
Read More...

Hi,
These items can certainly be done. The issue for me is that since I don't own a device to adjust tilt / backfocus its difficult to take this further on my own in a meaningful way. Happy to collaborate on it further though.
1. The traffic light idea needs some input from users over a range of equipment as to what constitutes R, A and G. One person's R will be another's A, etc etc. So some sort of consensus is required (which will probably be equipment related).
2. The invert buttons are a good idea.
3. Converting the tilt movements to something like turn screw 3 anti-clockwise a quarter turn is something that could be done but would require collaboration. AI already has information on the sensor but not the tilt device so the user would have to specify the location of the screws. For tilt I think if the thread-pitch on the screws were to be specified as well then it would be possible to calculate which screws need adjustment and by how much, to flatten the tilt. For backfocus its more complex: there isn't an easy relationship between backfocus delta and how far to move the sensor - its more a try it, see what happens and try again type of thing.
So, happy to explore doing more on it, if there are folks with tilt devices willing to collaborate.
Read More...

This was added quite recently....
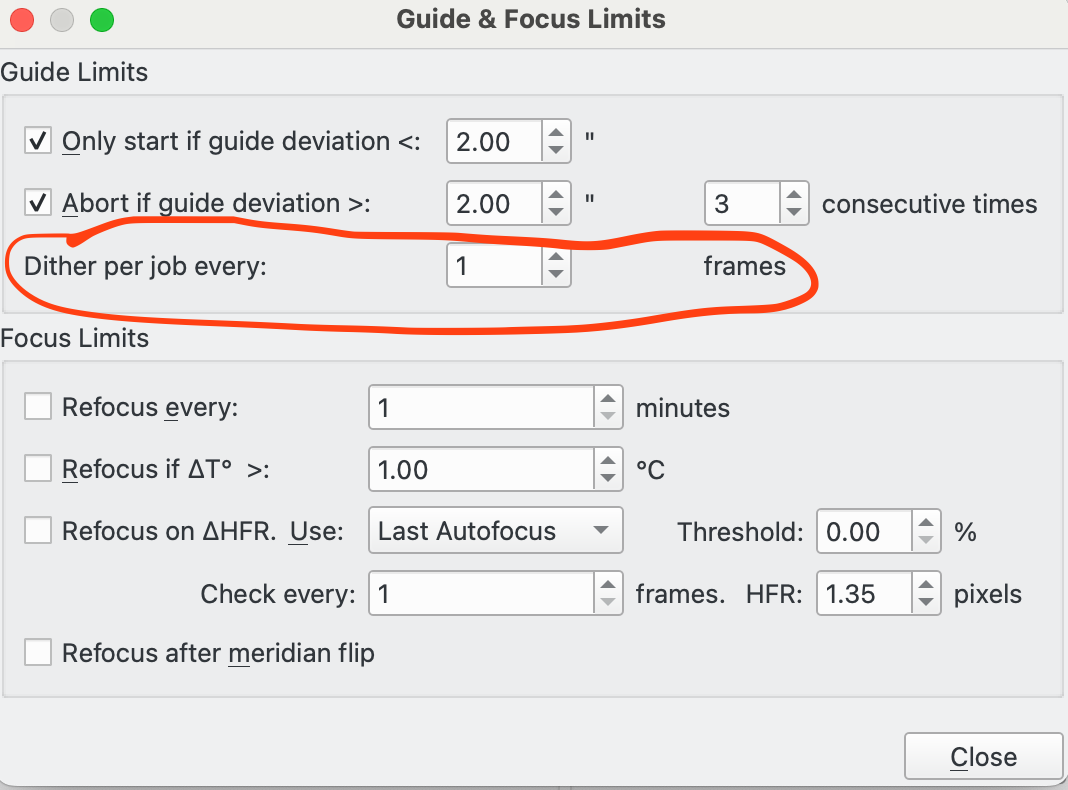
It allows you to override the global dither setting per job.
Read More...