INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Meridian Flip and other meridian issues with iOptron CEM25P
- Nico Augustin
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

- Posts: 48
- Thank you received: 8
Replied by Nico Augustin on topic Meridian Flip and other meridian issues with iOptron CEM25P
") I will check later today once more all the time settings in the hand conroller and in KStars and Ekos.
I will check later today once more all the time settings in the hand conroller and in KStars and Ekos. Please Log in or Create an account to join the conversation.
- Nico Augustin
-
Topic Author
- Offline
- Senior Member
-
- Posts: 48
- Thank you received: 8
Replied by Nico Augustin on topic Meridian Flip and other meridian issues with iOptron CEM25P
It´s very much appreciated and I´m happy to be here
")
I checked and tested once more. Still, I don´t get any Log-file even though verbose logging is activated for INDI and the Mount. No files appear in the log-files directory

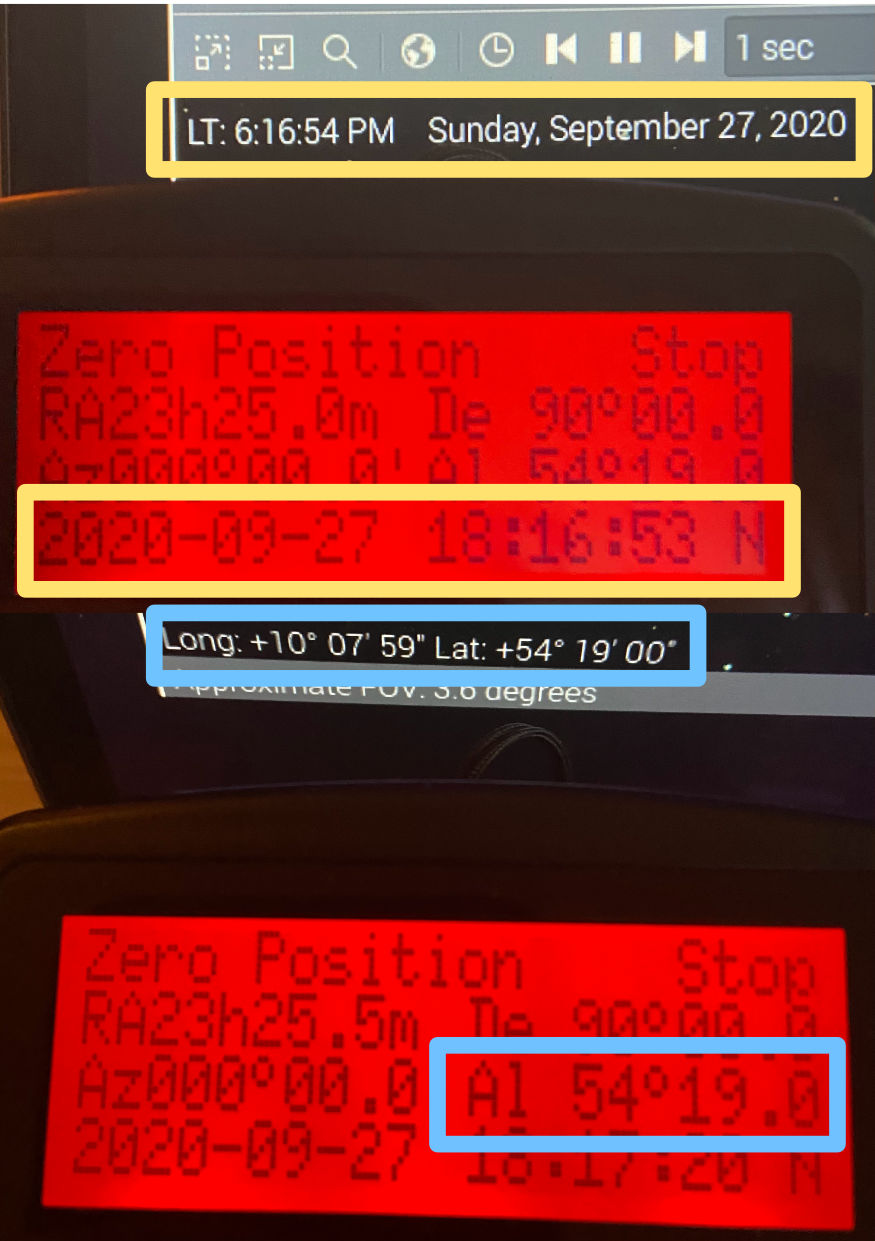
I checked again for any discrepancy of the time between mount and KStars but there is none. It also makes no difference if DST is on or off, neither in KStars nor in the Handcontroller. At the moment I have set in both UTC+2h (120min in the hand controller). The time is exactly the same in both - there is one second delay in the HC but I assume that is because KStars is set to update the mount what takes a second (see image).
Still, no automated meridian flip. Another thing that I tested is to approach to a target near both sides of the meridian (as suggested by picciux). Both times I started from the Zero Position. I would expect that the mount would approach the two sides of the meridian via the opposite sides of the pier (we do know already that this is not working but just wanted to test it once more).
So, when I command to slew to a (random) star that is approaching the meridian from the East, the scope slews to it via the West side of the pier, pointing East - all fine. When I go back to the Zero Position and command now to slew to a target that already passed the meridian towards the West I would assume the scope slews via the East side of the pier, pointing West… but it does exactly the same as before. So yes, agreed that Mount and Ekos disagree in something here but why?, time and location match exactly.
I even simulated a plate solving after slewing to the star that was close to cross the meridian and set the solver action to Sync. It succeeded with the info that the mount is synced to the solution coordinates. So, the mount should actually know perfectly, where it´s pointing at. Still, no auto-meridian flip.
Then I did read in the StellarMate FAQs that „All mounts must be first aligned using the handset using 2 or 3 star alignment before you can use them with StellarMate. The only exception to this rule is…“ EQMod mounts where it is assumed that they point to the celestial pole at startup anyway. There a plate solve and sync shall be necessary. Well, my routine usually is to start up, polar align (via Ekos Polar alignment), then slew to a bright star using plate solving and „slew to target“ for focusing (I don´t have a motor-focus yet) and then slwe to my target, plate solve with „slew to target“ again, start guiding, start imaging… With all this plate solving the system should know quite well where it´s pointing at, right?
Are you other CEM25P users do a 2-3 star align after setup? I never did that since I plate solve.
Running out of ideas and since I can´t save a log-file I can´t provide any new info at the moment.
Will read on a bit
Cheers, Nico
Please Log in or Create an account to join the conversation.
- Wouter van Reeven
-

- Offline
- Supernova Explorer
-

- Posts: 1957
- Thank you received: 420
Replied by Wouter van Reeven on topic Meridian Flip and other meridian issues with iOptron CEM25P
I think that that part of the FAQ is outdated as no alignment is needed with iOptron mounts.
Please Log in or Create an account to join the conversation.
- Nico Augustin
-
Topic Author
- Offline
- Senior Member
-
- Posts: 48
- Thank you received: 8
Replied by Nico Augustin on topic Meridian Flip and other meridian issues with iOptron CEM25P
Please Log in or Create an account to join the conversation.
- Jose Corazon
-

- Offline
- Supernova Explorer
-
- Posts: 1119
- Thank you received: 182
Replied by Jose Corazon on topic Meridian Flip and other meridian issues with iOptron CEM25P
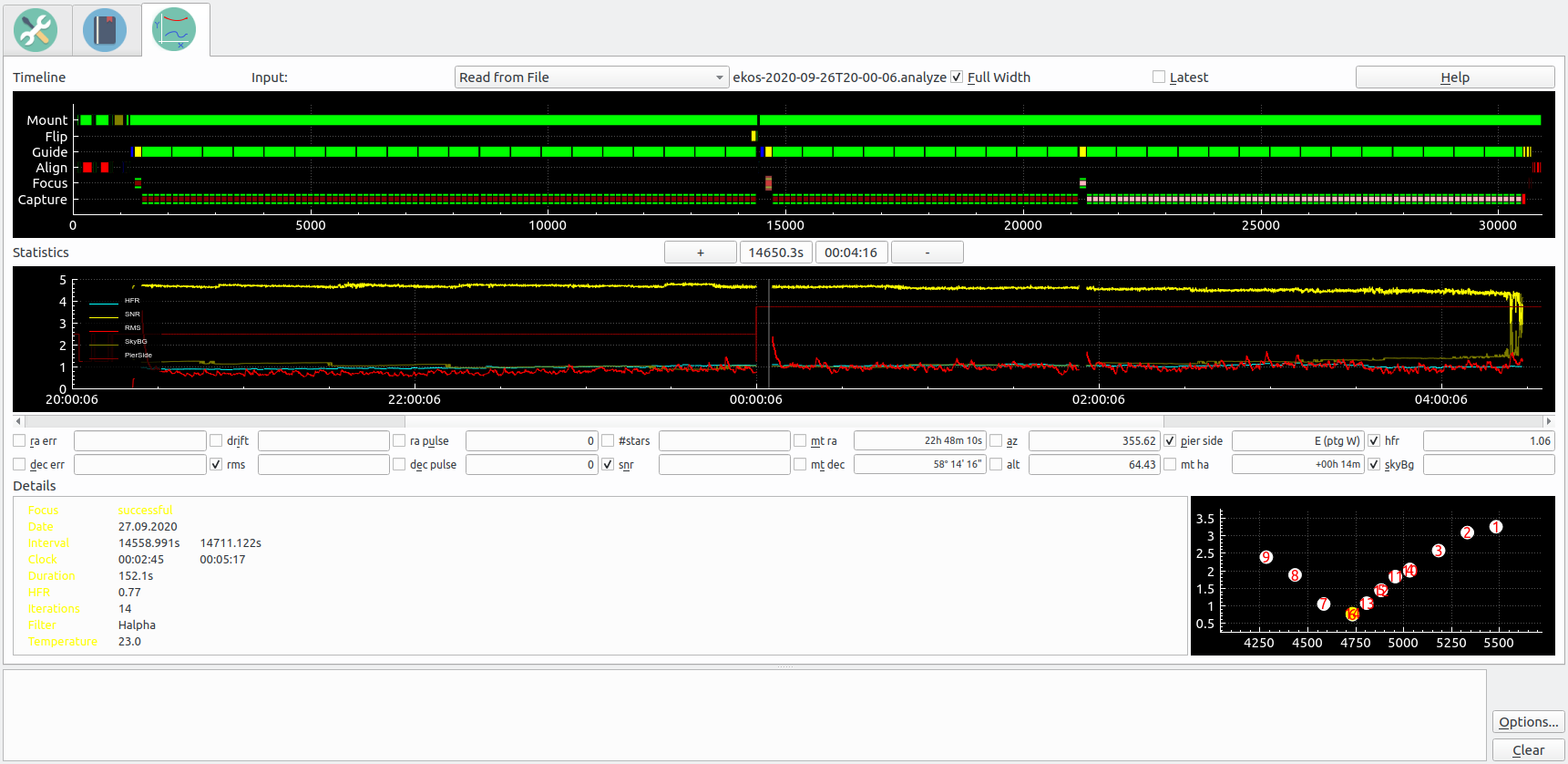
Performed flawlessly. I started the scheduler, went to bed, woke up to a perfectly parked mount which had performed its meridian flip on time, reacquired guiding and parked itself, when nautical twilight started.
Here the analyze file for it (change the file type from .txt to .analyze and open from within Ekos and the Analyze tab):
Jo
Please Log in or Create an account to join the conversation.
- Gonzothegreat
-

- Offline
- Moderator
-

- Posts: 2255
- Thank you received: 223
Replied by Gonzothegreat on topic Meridian Flip and other meridian issues with iOptron CEM25P
HC: 190422
RA: 190422
DEC: 170106
Please Log in or Create an account to join the conversation.
- Jose Corazon
-
- Offline
- Supernova Explorer
-
- Posts: 1119
- Thank you received: 182
Replied by Jose Corazon on topic Meridian Flip and other meridian issues with iOptron CEM25P
HC: 170518
RA: 170106
DEC: 170106
I am way behind yours, Stephane!
I don't think firmware is the problem.
Please Log in or Create an account to join the conversation.
- Jose Corazon
-
- Offline
- Supernova Explorer
-
- Posts: 1119
- Thank you received: 182
Replied by Jose Corazon on topic Meridian Flip and other meridian issues with iOptron CEM25P
I didn't know that and at any rate, never used the hand controller outside my living room. Certainly did not perform any star alignment with it. Out of the box, I just plugged it into my Pi and used Ekos to drive the mount. The only adjustments on the HC I made was setting DST to N, time zone to -300, Flip to 4 degrees past meridian and behavior to flip, not stop. All the rest was done in Ekos.
Please Log in or Create an account to join the conversation.
- Gonzothegreat
-
- Offline
- Moderator
-
- Posts: 2255
- Thank you received: 223
Replied by Gonzothegreat on topic Meridian Flip and other meridian issues with iOptron CEM25P
My USB cable should be there in a few days time, I will be able to test this park & meridian flip soon.
Please Log in or Create an account to join the conversation.
- Jose Corazon
-
- Offline
- Supernova Explorer
-
- Posts: 1119
- Thank you received: 182
Replied by Jose Corazon on topic Meridian Flip and other meridian issues with iOptron CEM25P
Works great.
Please Log in or Create an account to join the conversation.
- Nico Augustin
-
Topic Author
- Offline
- Senior Member
-
- Posts: 48
- Thank you received: 8
Replied by Nico Augustin on topic Meridian Flip and other meridian issues with iOptron CEM25P
Its almost the same with me, I usually only use the HC to set and store the home position now and then as well as slew it back to the home position if Ekos fails to do that.
So, I guess, seeing all this different Flip XY degrees past meridian settings in the HC it is not an issue with the HC or the mount. I have mine set to UTC+120min, DST=N and to perform a flip at 3deg past meridian.
I did used Mount updates KStars because to make use of the GPS and I have it now on KStars updates mount - either way it did not work.
Can someone of you maybe share the mount settings in INDI and Ekos? May I can find any difference in comparing those.
Please Log in or Create an account to join the conversation.
- Wouter van Reeven
-
- Offline
- Supernova Explorer
-
- Posts: 1957
- Thank you received: 420
Replied by Wouter van Reeven on topic Meridian Flip and other meridian issues with iOptron CEM25P
Wouter
Please Log in or Create an account to join the conversation.