INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Astrotrac 360 INDI Driver documentation development

Replied by Abdi on topic Astrotrac 360 INDI Driver documentation development
So basically indi is querying the mount every 3 secs? and that stops the timeout errors.
What does that signify? Is 3 seconds sufficient time to ensure that appropriate parameters from the mount a read in a timely fashion.
If that fixes it for good that is excellent.
Also I agree richard needs to take a more active role in the development as even TheSkyx Has the same serial timeout error. It maybe worthwhile communicating with him about appropriate polling rates for the mount for external software. Within the console a code outputs an answer about encoder status in ms <20ms . But indi is chatty so maybe every-time it polls it may involve more information provided/checked that may cause the errors.
Getting Richard is the difficult bit, he had some issues but I understand that is all recovered.
It would be useful to work with him with regards to this.
Please Log in or Create an account to join the conversation.

Replied by Peter on topic Astrotrac 360 INDI Driver documentation development
Please Log in or Create an account to join the conversation.
Replied by Peter on topic Astrotrac 360 INDI Driver documentation development
In the mean time I have sent Richard a mail, explaining the situation and asked him for his involvement.
Please Log in or Create an account to join the conversation.
Replied by Abdi on topic Astrotrac 360 INDI Driver documentation development
But when I first connect the mount in ekos.
I got to park and physically press unpark then park again to force it to park. For some reason the mount always begins unparked and tracking. This is default firmware behaviour since the mount is technically designed to be turned on and immediately start working. When using an external software one has to trigger a park event first for the program to “take over” I feel all our problems are related to something with the native design of the mounts firmware.
Also there is new firmware and UI files from Astrotrac on there website. I am yet to update them as well not sure of they make a difference. I am also assuming your astrotrac driver for indi is uptodate.
I have not used my mount due to weather and other commitments for some time , but will likely start again soon and I’ll probably update the firmware and UI first.
I hope Richard participates in this discussion.
For me the TheSkyX plugin was also unusable due to frequent timeout errors although I never tried with a high gain antenna etc.
I also suggest what sameer told me use the ethernet cable to connect to the pi inside whilst testing to eliminate some latency. Unfortunately there is no way to connect a wired connection to the mount. I feel if it could that would fix all our problems for good. Not sure how to go about doing that.
Please Log in or Create an account to join the conversation.
Replied by Peter on topic Astrotrac 360 INDI Driver documentation development
I have also tried the unpark park routine, but the dot before the park option immediately turns red when I do that and only the RA drive will park.
I’ll setup and switch drives now and see what happens.
I too hope that Richard will join in on this. Before the mount came out he basically promised all this functionality, but he doesn’t seem to involved lately. I am sure he has his reasons.
Again I am working with Jerry on Cloudynights. He is trying to add to the current UI to give it goto functionality and the basics look pretty good so far.
wired connection is definitely something we could’ve used. I wonder if it could be added to the board, shouldn’t be too hard I would think.
Please Log in or Create an account to join the conversation.
Replied by Peter on topic Astrotrac 360 INDI Driver documentation development
Please Log in or Create an account to join the conversation.
Replied by Peter on topic Astrotrac 360 INDI Driver documentation development
Peter
Please Log in or Create an account to join the conversation.
Replied by Peter on topic Astrotrac 360 INDI Driver documentation development
I tried that via the UI as well and it caused me to no longer be able to communicate with the mount. That’s why I had to flash the entire software to the mount with Arduino. So please be careful when upgrading.
Please Log in or Create an account to join the conversation.
Replied by Abdi on topic Astrotrac 360 INDI Driver documentation development
By the way the latest UI is only compatible with the latest fw. Did you update FM then try load the UI files from the ui?
Also what were the steps to load it via arduino, I had to do some time ago like a year so Ive forgotten the complete steps. Do you mind posting the steps in sequence, in case I wreck mine.
Please Log in or Create an account to join the conversation.
Replied by Peter on topic Astrotrac 360 INDI Driver documentation development
Anyway I had a lengthy conversation with Richard last year by email, where he described all the steps including some screen shots. I’ll be posting those here later today. I simply do not have time to do that right now. I found that I still had Arduino running om my computer and as I had done it before, it was still properly setup to work with Astrotrac, so I was done in just a few minutes. With the firmware update, Richard also posted a folder with all the files that need to be transferred to the mount, not just the three that he says you need to transfer. I used those and everything is working fine no, finally!
Peter
Please Log in or Create an account to join the conversation.
Replied by Peter on topic Astrotrac 360 INDI Driver documentation development
I am testing for him as he does not own the mount. I am sure that he would like to get some help, especially from someone with coding skills. It would be nice if maybe you guys here would get involved in that project as well.
github.com/concordia000/Astrotrac360UI/r...ses/tag/v0.0.6-alpha
This is the link where you can download the files. All you need to do is extract the folder on your computer, connect to the mount and then from the file run Astrotrac360 html file. The interface looks like the one from Astrotrac, but has some basic extra functionality in it.
Peter
Please Log in or Create an account to join the conversation.
Replied by Peter on topic Astrotrac 360 INDI Driver documentation development
1. you need to install Arduino IDE
2. Install the following 2 plugins: 1. arduino-esp8266.readthedocs.io/en/latest/installing.html
2. github.com/earlephilhower/arduino-esp8266littlefs-plugin
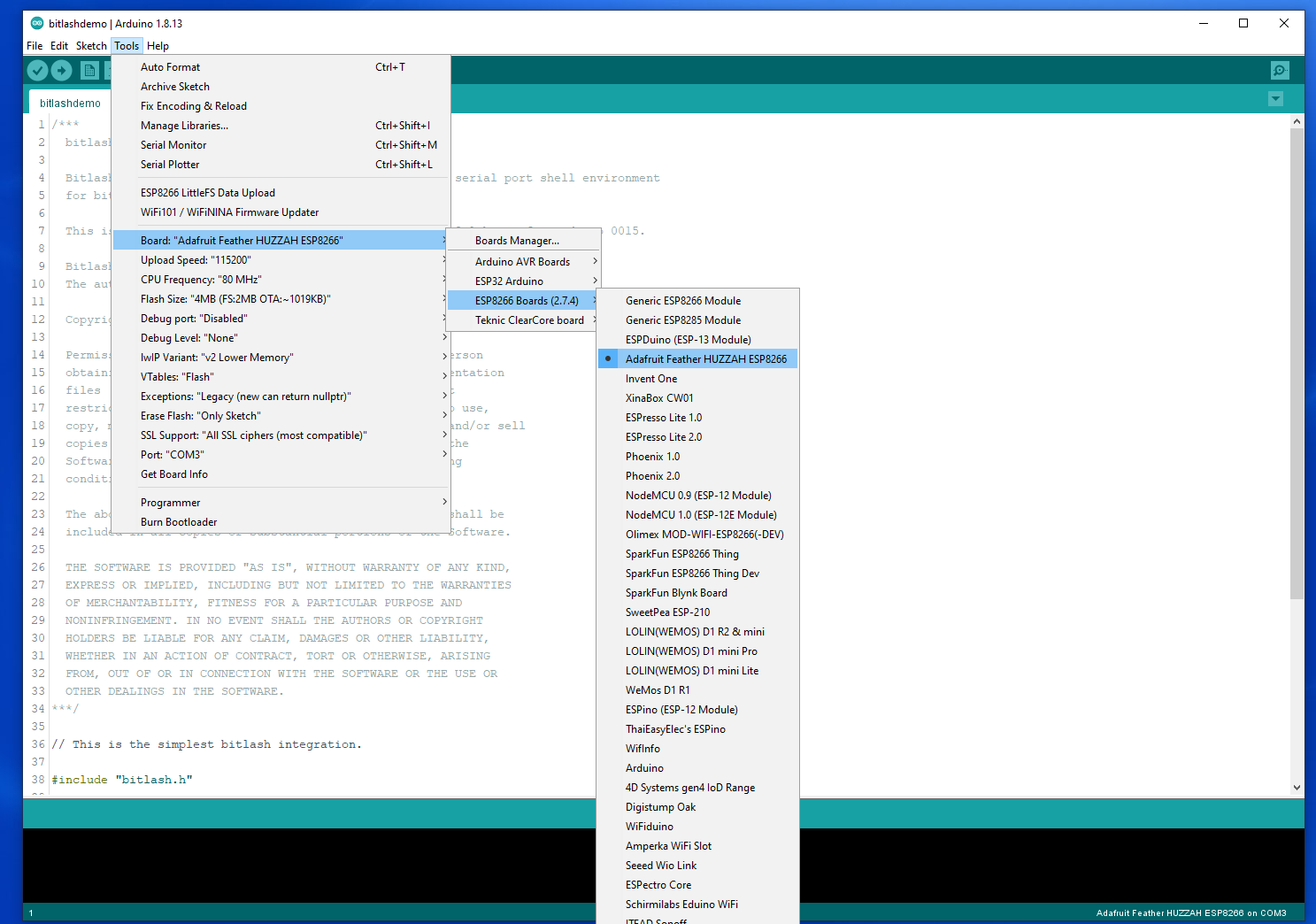
3 in Arduino . Select board: see screenshot 1
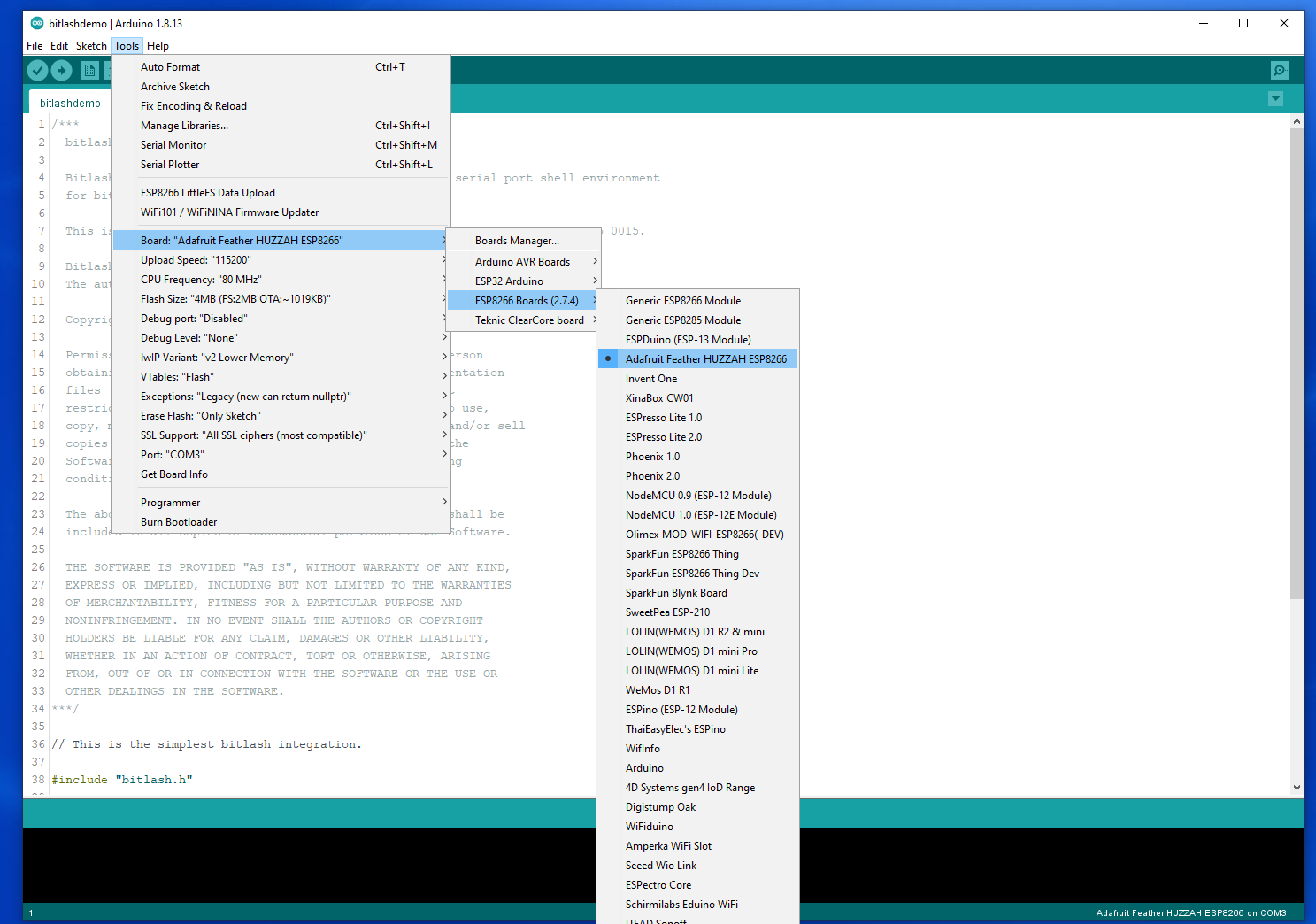
4.Ensure board options are as follows (particularly the Flash Size must be FS: 3MB): see screenshot 2
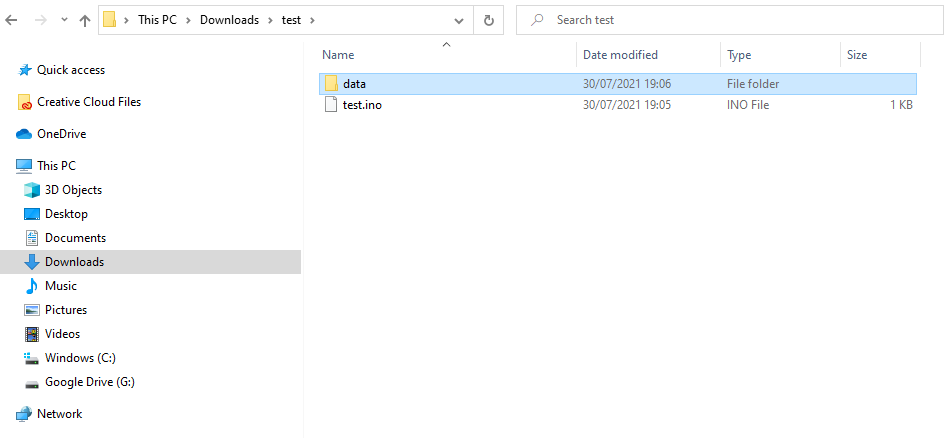
5.Create a new empty project - call it something like 'test'. Once the new project is created, open your file manager, and create a new empty folder called 'data' in the folder containing your test.ino file.
The folder/file structure should be as follows: see screenshot 3
6.Copy the mounts files (from the Astrotrac website) to the data folder you've just created.
7. Power up your 360 drive, connect to it's WiFi access point.
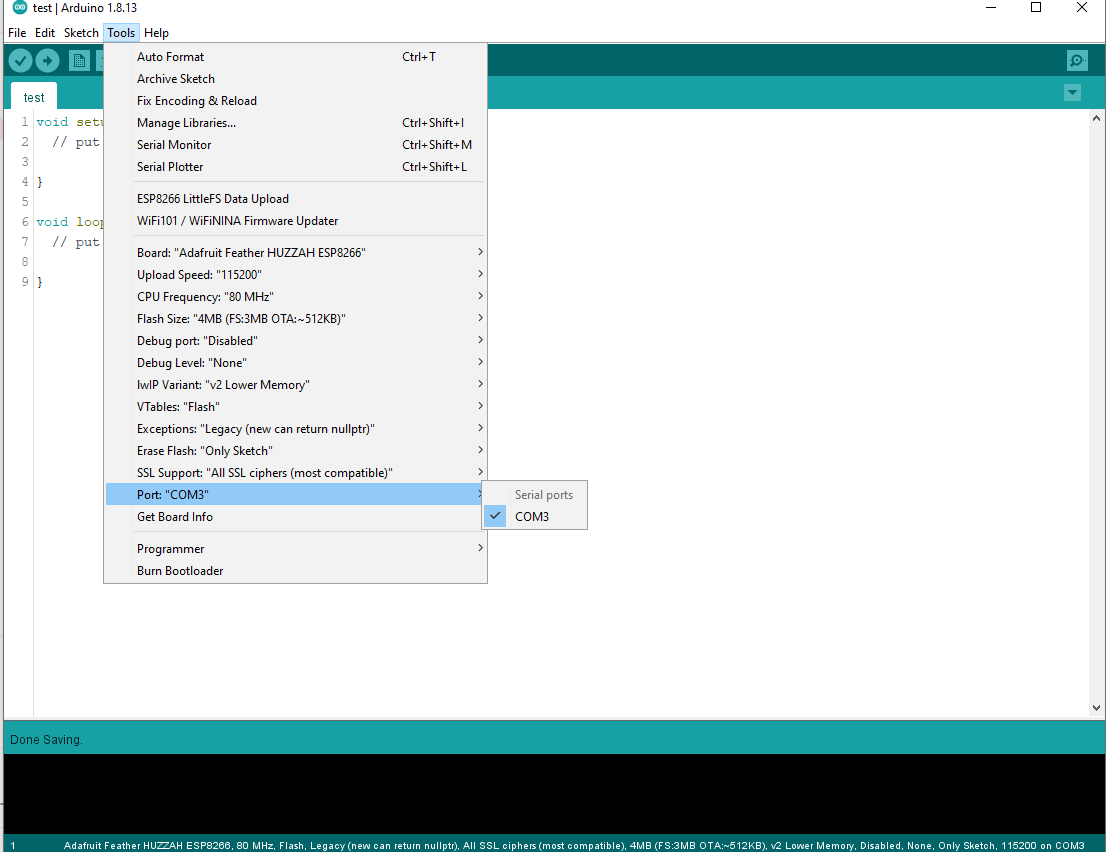
8.In the Arduino IDE, you should see your 360 drive's IP address on the port menu, under the COM ports IP address not shown in the below screenshot):see screenshot 4
I did not see the mounts adress here right away, but got it afer restarting my computer while still connected to the drive's wifi. That worked
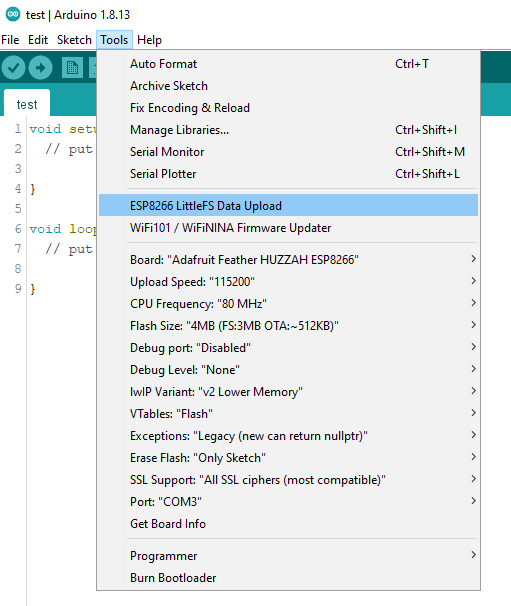
9.
Goto the Tools menu and select the ESP8266 LittleFS Data Upload option - this will upload everything you've placed in your sketch 'data' folder (the mount.js.gz file) to your 360 drive:see screenshot 5
Only takes a little while to copy all the files, after that things should work again.
Attachments:
Please Log in or Create an account to join the conversation.