



thank you
I downgraded to 1.9.8 which I was using before.
KStars could not be downgraded due to an error, but I was able to downgrade the server and driver, so I was able to use the driver that did not work.
Read More...
tstudioastronomy.blog.fc2.com/blog-entry-634.html
I wrote the information that I could not write here on my blog. (If you are interested, please read it with the translation function.)
Read More...

I summarized the requests and made a diagram.
The points are as follows.
・Do not mix with existing functions → It becomes difficult to use if there is a problem or lack of functions.
・Simplify the driver connection procedure.
Add an interface that simply has what you need where you need it. (for EAA)
EAA requires functions similar to those for planetary imaging. (Currently the most lacking part)
If only the EAA part is newly added and the steps to connect are reduced, it will be friendly to new users.
The atmosphere has changed a lot since the last forum, and I myself can't use some of my devices due to this update, so this is my final request.
Hope for better development.
Read More...
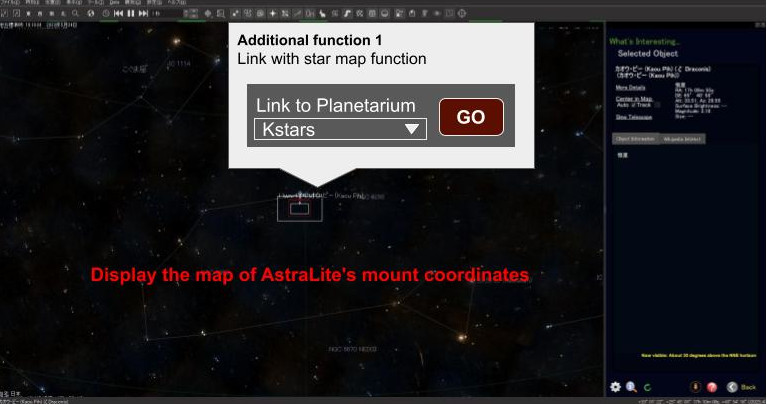
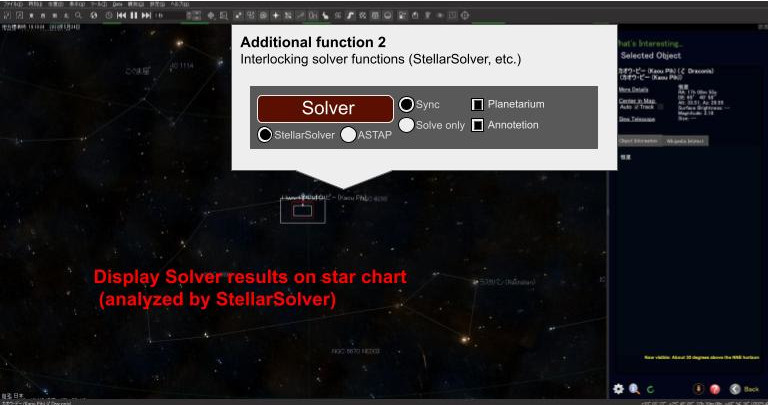
I think that it will be simple and easy to use by linking with the functions of Kstars and Ekos as shown in the figure.
Read More...
Add a button that uses an existing function. (rather than using Ekos)
AstraLite uses only buttons and the excellent StellarSolver.
AstraLite keeps it simple
Read More...
I've been using Padrick's CCDCiel since the driver became unusable due to an update recently.
The connection rules with the driver are clear, and operations can be switched with tabs centering on the LOOP image, making it easy to use and stable.
Dennis, who recently developed AstraLite, is actively developing it, and the live stacking feature is stable.
It might be a good idea to try talking to them.
The key is to make it easy for new users to use.
Currently, there are many users who have trouble finding the process and necessary functions to connect the driver. . .
Read More...
good job for today.
I'm glad I didn't forget EAA.
I'd like you to add functions such as live stacking and camera parameter adjustment, but before that, I would like you to work on something.
A review of server driver update rules and a review of Kstar and Ekos UI when adding features.
In my current progress, I have a driver that stops working every time I update.
I would like the compatibility of the driver configuration file to be maintained so that the old rules remain even if the server or driver changes the connection rules so that users can always use the device stably.
Also, when adding EAA, I would like you to research existing EAA environments such as SharpCap and ASIlive and make it easier to use with Kstar and Ekos.
Previously, we proposed a UI that allows all operations to be performed in an independent window, but users have made useful suggestions such as adding a tab function.
I would like to see it developed in a form that is easy to use even for new users.
Read More...