INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Announcing Polar Alignment Changes
- Hy Murveit
-
 Topic Author
Topic Author
- Online
- Administrator
-

- Posts: 1226
- Thank you received: 566
Announcing Polar Alignment Changes was created by Hy Murveit
This is in the 3.6.0 beta code and (soon) in the nightly releases. If you see the screenshots below, including the LED line below the image display, you have the new software. Please feedback and issues or suggestions you might have.
(Note that this is post 1 of 2, as the forum software doesn't allow all the attachments I'd like to include in this post).
Summary of Changes
The original polar-alignment error measurement scheme has not changed. The user interface has changed slightly--different messages and a new LED display to indicate progress.
The original polar-alignment refresh/correction method still exists (if you choose the "MoveStar" or "MoveStar & Cal Err" refresh methods).
A new polar-alignment refresh/correction method is provided called "PlateSolve". It allows for corrections of larger polar-misalignment in a single pass, does not depend on the image display, and may be more reliable if your plate solving is working well.
***Detail Below***
Background
There are two distinct phases to the polar-alignment process.
- The first phase is the Measurement phase. In this phase, PA captures 3 images, and your telescope is rotated along the RA axis between the captures. These three captures are used to estimate the mount's RA axis of rotation, and, given the geographical location of the telescope, the polar-alignment error.
- In the second phase, the Refresh phase, the user (you) adjusts the mount's altitude and azimuth knobs to correct (reduce) the polar alignment error, following instructions from the PA process. (Ekos typically cannot control the altitude and azimuth adjustment directly, or else this could be fully automated). The PA process regularly captures images, and using these images, estimates the new/adjusted RA axis, and thus the remaining polar-alignment error after the corrections the user has made to the altitude and azimuth knobs.
Usage Instructions
The Measurement Phase.
Point the telescope. At the start, point your telescope at an open patch of sky where your mount can rotate in RA 30-60 degrees and still be pointing clear sky, and not crash into the tripod. Typically, one points at or near the North or South Celestial Poles. However if the pole is obscured, one may point near the meridian (e.g. just west of the meridian and slew to the west, or just east of the meridian and slew to the east). In fact, any part of the sky could work.
Select the Measurement Phase parameters. Select the slew direction, the slew speed, and click Start. The process will start, and if all goes well capture and solve 3 images, with mount slews between them, and, when done, report a polar-alignment error. During this time LEDs, text message, and the log window help communicate the system's progress. See the screenshots below.
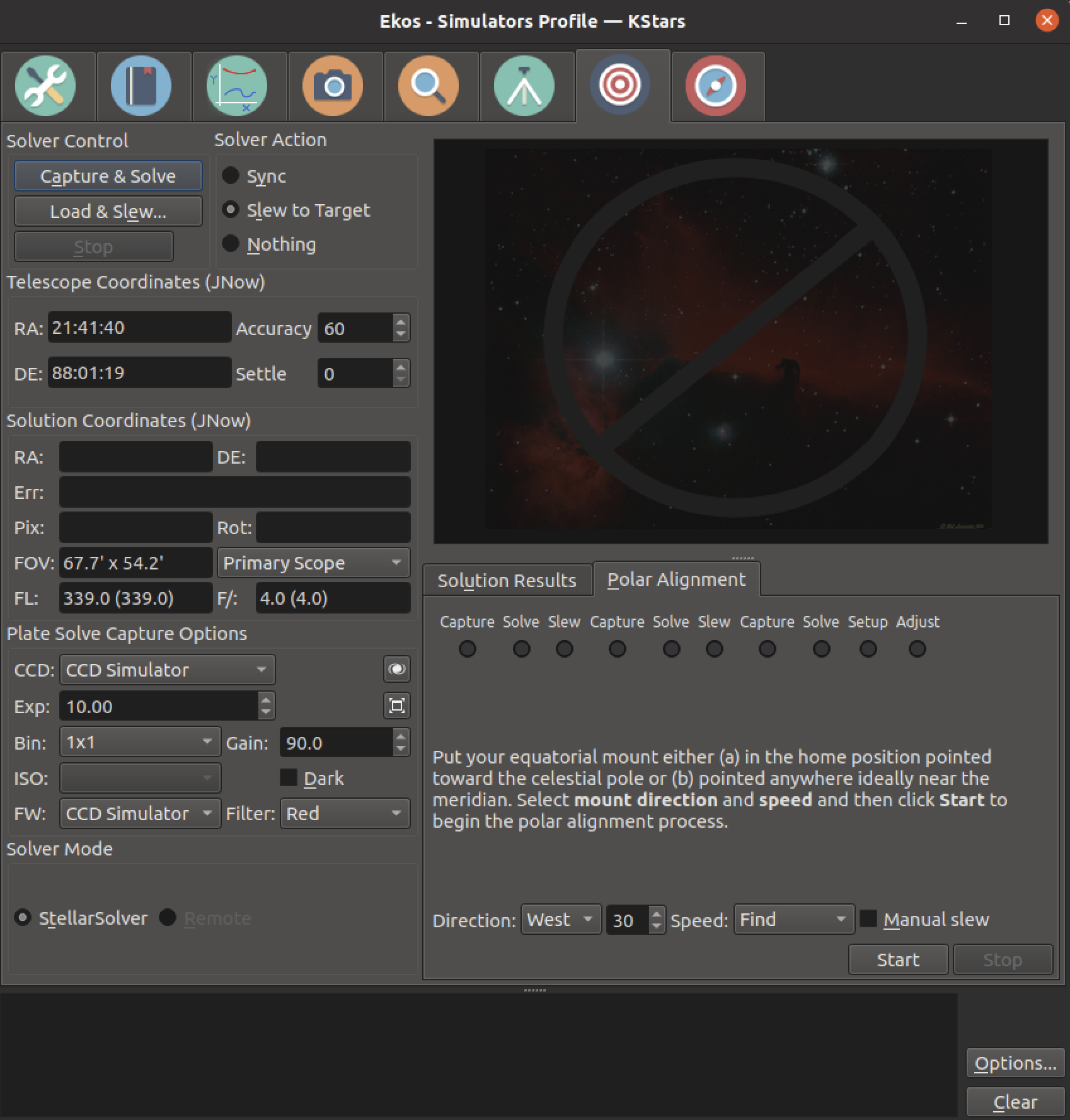
The user has not started the polar-alignment process yet. The telescope should be pointed
at an appropriate place in the sky (preferably but not necessarily near the Pole). The direction of rotation and slew speed should be selected, and the Start should be clicked.
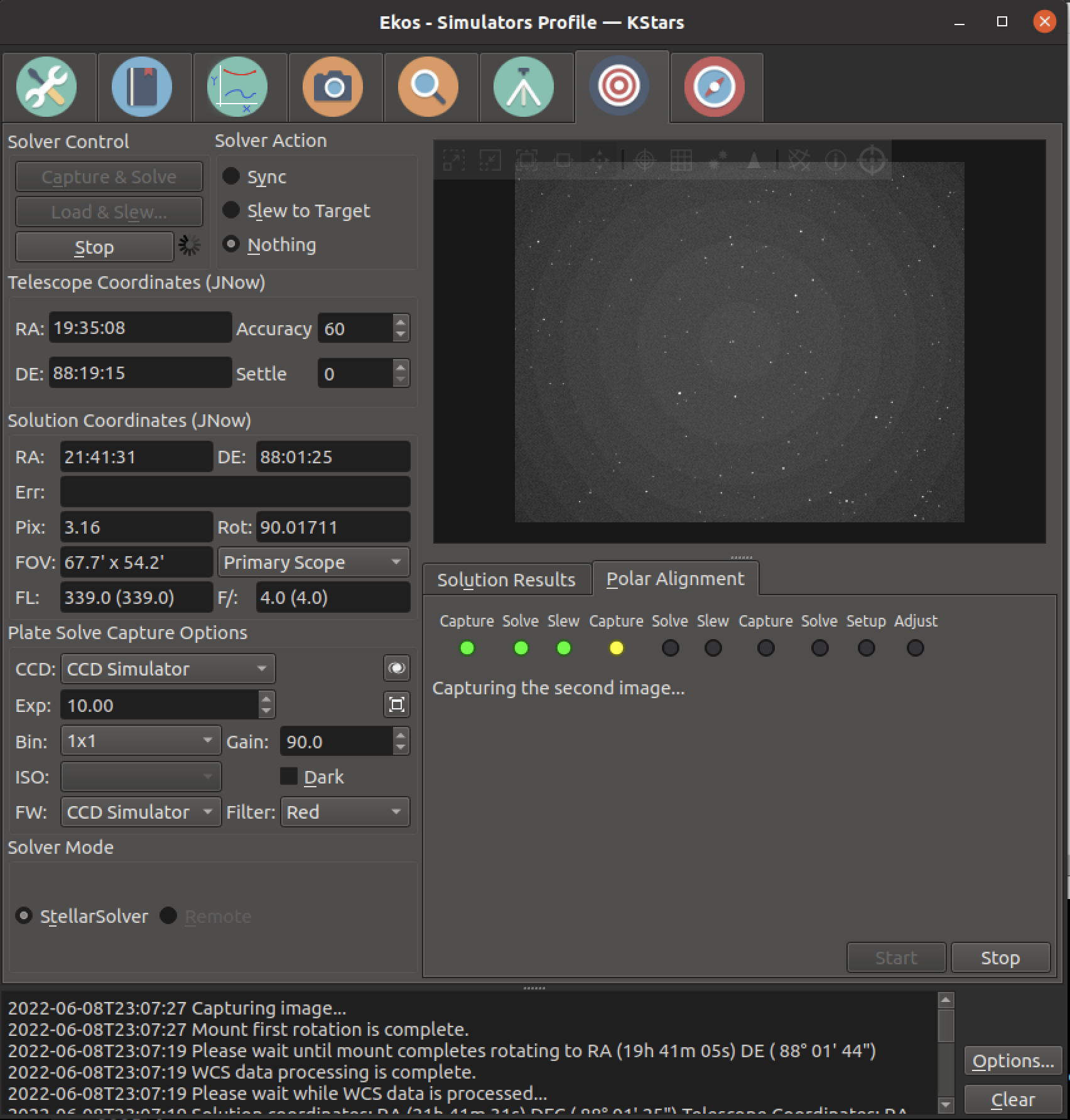
The system is in its measurement phase. The second image is being captured.
The Refresh Phase.
Once the measurement phase is complete, the Refresh phase begins.
Select the Refresh Phase parameters. There are two main parameters to choose. The image exposure time, and the refresh algorithm.
- Choose the exposure time such that images with clear stars are captured, and that your computer is fast enough to process the images in a similar amount of time. 2s is often a good choice.
- There are two main algorithms, the traditional MoveStar algorithm, and the new PlateSolve algorithm.
The MoveStar Method. The existing MoveStar algorithm can work with no further computer smarts. You click on a star in the image, and the system overlays a colored triangle on the image so that the vertex between the yellow and purple sides touches the star. You then adjust the altitude knob to "move the star" along the yellow side of the triangle. Doing this should correct the altitude polar-alignment error in your mount's RA axis. Then adjust the azimuth knob to "move the star" along the green side, until the star finally reaches its target. At this point, your mount should be polar aligned.
A related algorithm called MoveStar & Calc Error is similar. In addition to the above, the system assists you by circling the star it believes you are tracking, and by letting you know its estimate of the remaining polar-alignment error. These extra features are nice, but are not necessary to achieve polar alignment.
The advantage of the MoveStar approaches is that they are simple, potentially fast, and don't necessarily need computer smarts (you can track/move the star without them). The disadvantage is that it cannot correct errors larger than the image field-of-view. It can point you in the right direction, but you need to iterate, and finally have an error less than your field of view before you can eliminate your polar-alignment error.
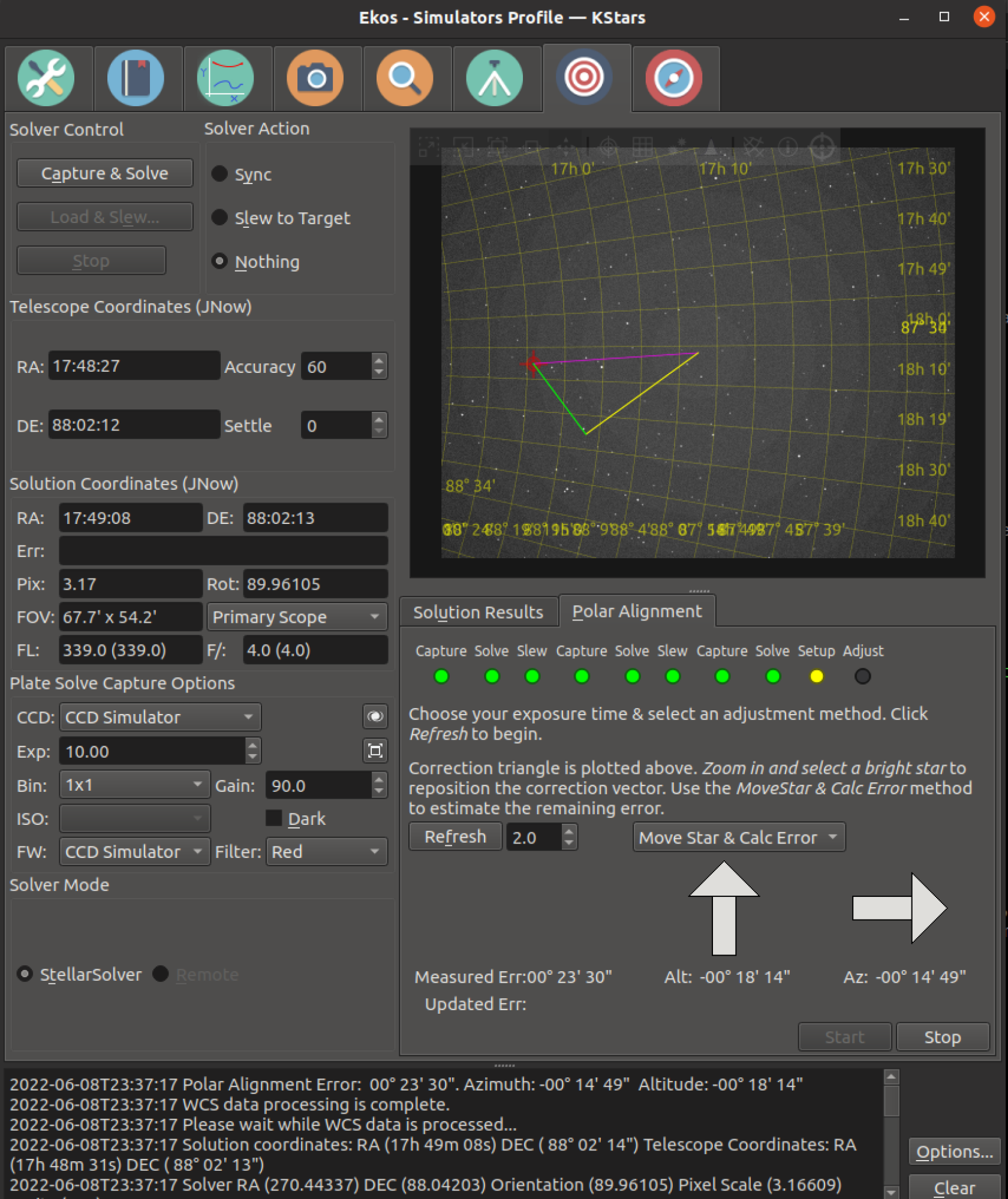
MoveStar & Calc Err algorithm is selected with 2s refresh.
Error directions and magnitudes are displayed.
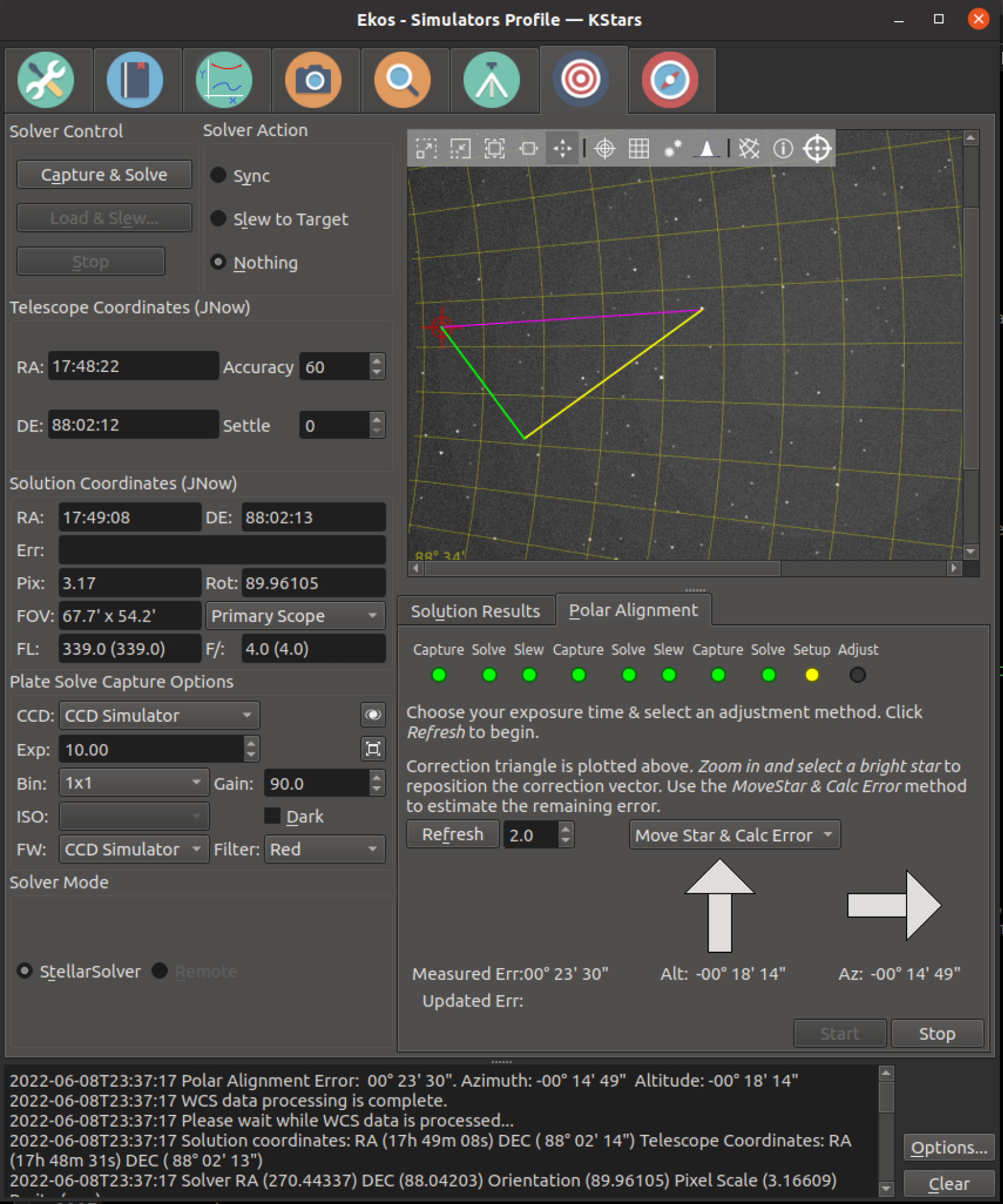
User has zoomed in, and clicked on a star. Triangle moves to the star.
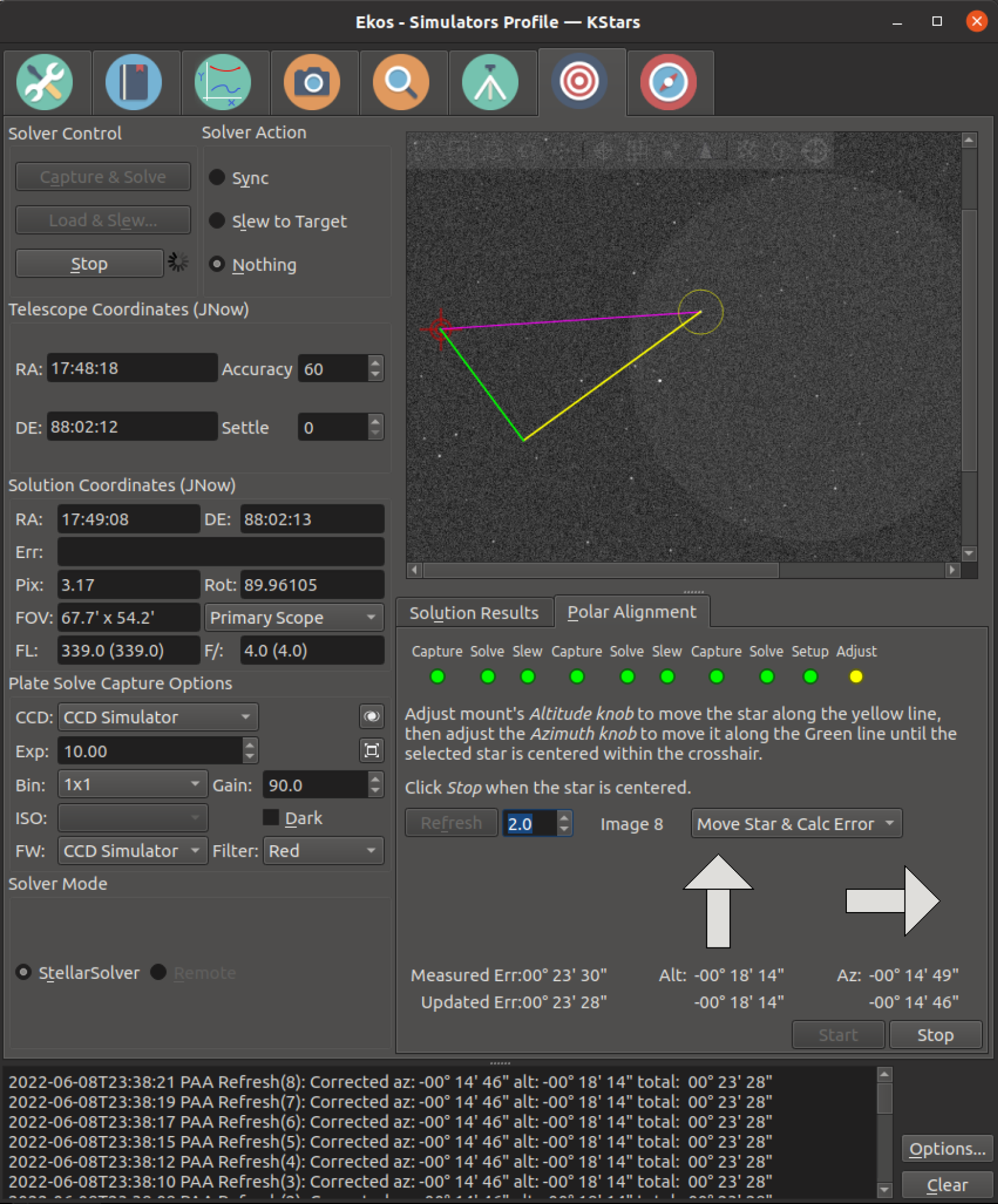
User has clicked Refresh. User's star is circled.
PA error is estimated, but as user hasn't adjusted knobs yet, it's the full error.
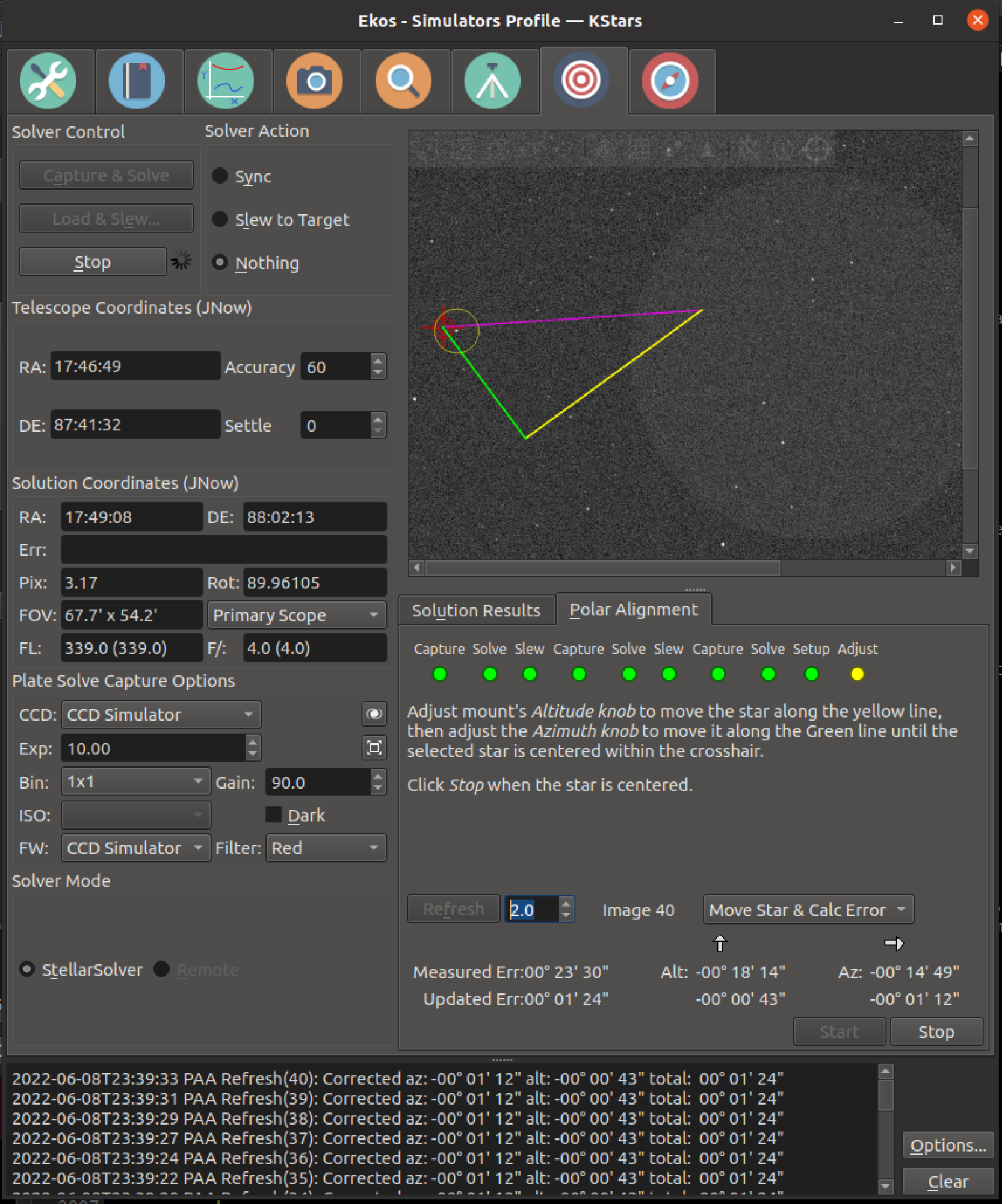
Star has been moved along the yellow line by adjusting the altitude knob, and now along the green line to near the target. The process is almost done.
Attachments:
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Online
- Administrator
-
- Posts: 1226
- Thank you received: 566
Replied by Hy Murveit on topic Announcing Polar Alignment Changes
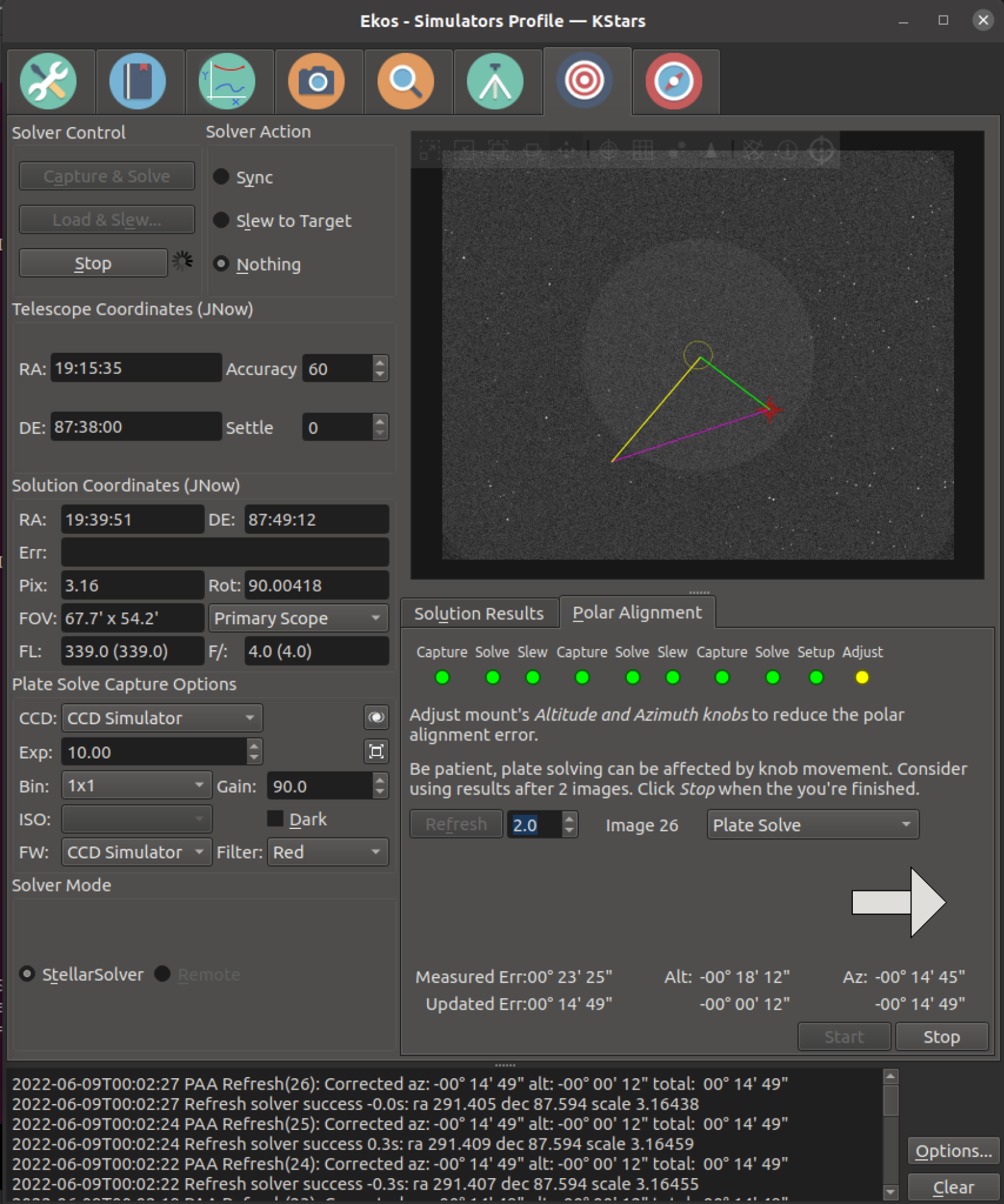
The PlateSolve Method. A new alternative to MoveStar is the PlateSolve method. This can polar align mounts with larger alignment errors in a single procedure. A similar triangle is displayed on the image display, but it is not central to this scheme. Rather the user should concentrate on the Updated Error line at the bottom of the display, and attempt to zero the Altitude and Azimuth errors. Also, arrows display the direction the mount needs to move to reduce error. The method works by plate-solving images as they are captured, and then estimating the user's knob-adjustments from the plate-solve solutions. Note that, since knobs may be moved during exposures, some images may have large star trails and plate solves may fail. Be patient and allow the system to capture a clean image before relying on the error estimate. [A triangle is superimposed on the image display, but note it is slid across the image as corrections are made, and thus do not attempt to "move stars along this triangle".]
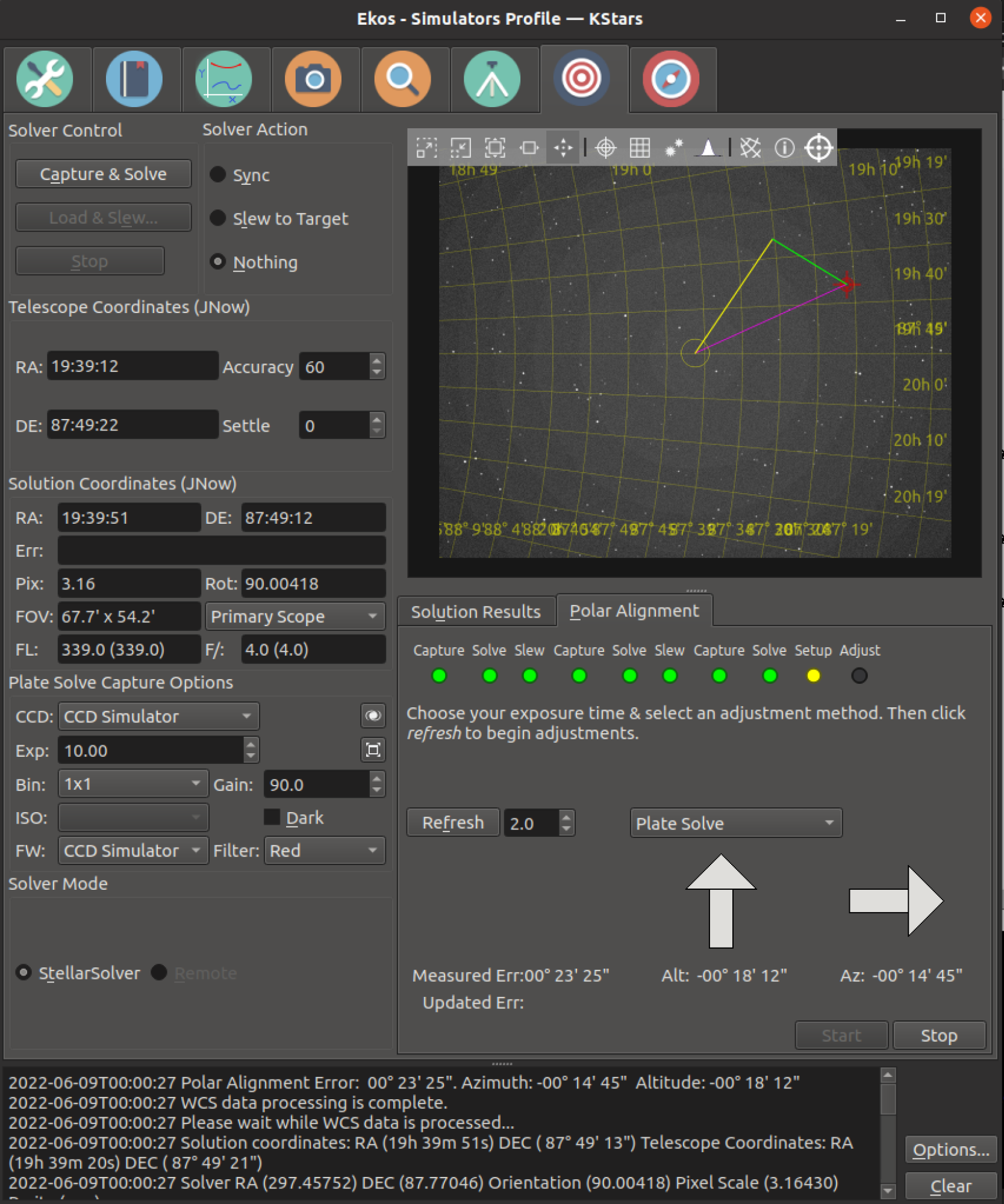
The PlateSolve method is selected with 2s refresh. Error directions and magnitudes are displayed.
User has clicked Refresh. The center of the screen is circled. PA error is estimated, but as user hasn't adjusted knobs yet, it's the full error.
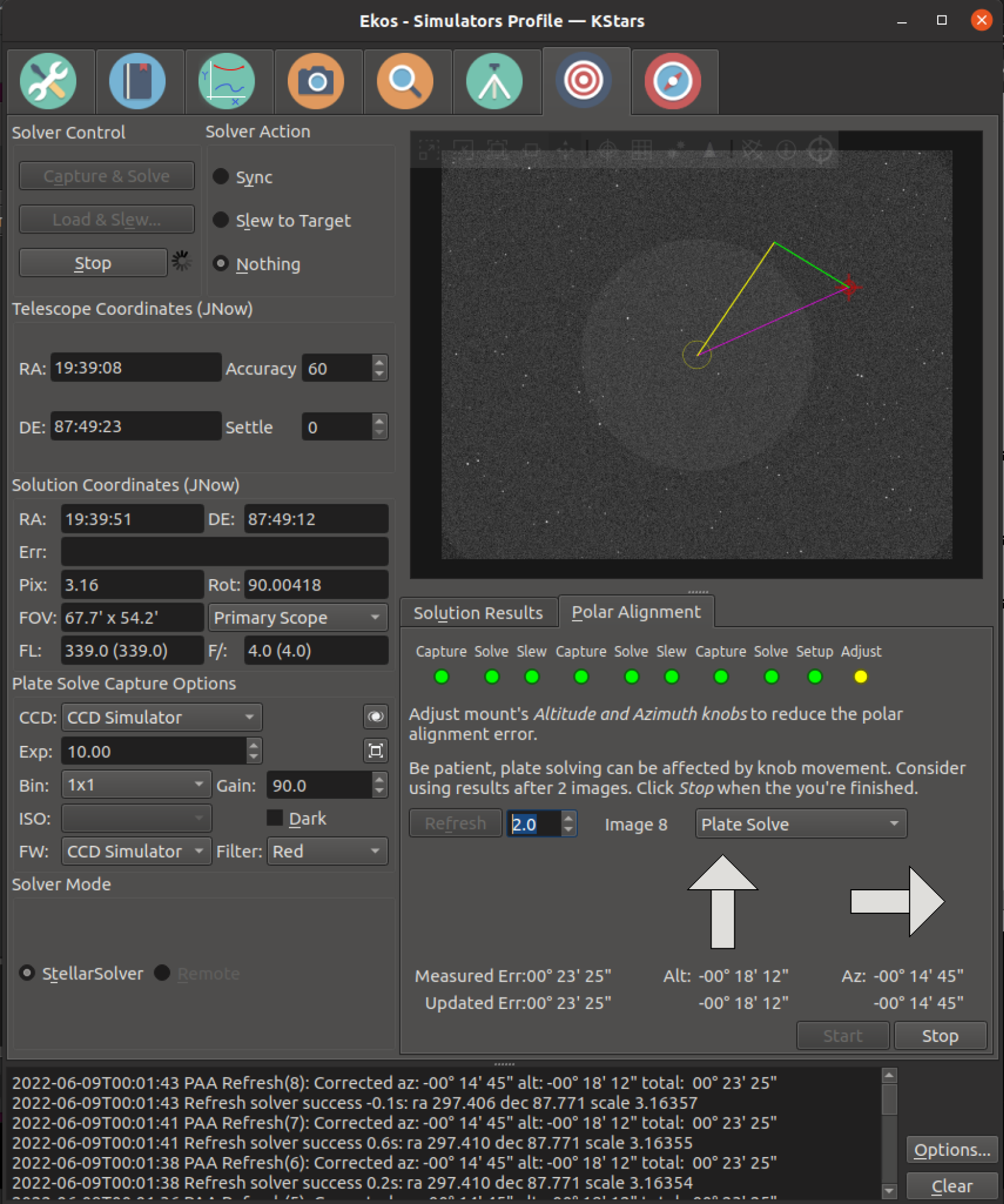
The user has adjusted the Altitude knob such that the altitude error on the bottom line is now only 12". The altitude arrow has disappeared, but there is still azimuth error.
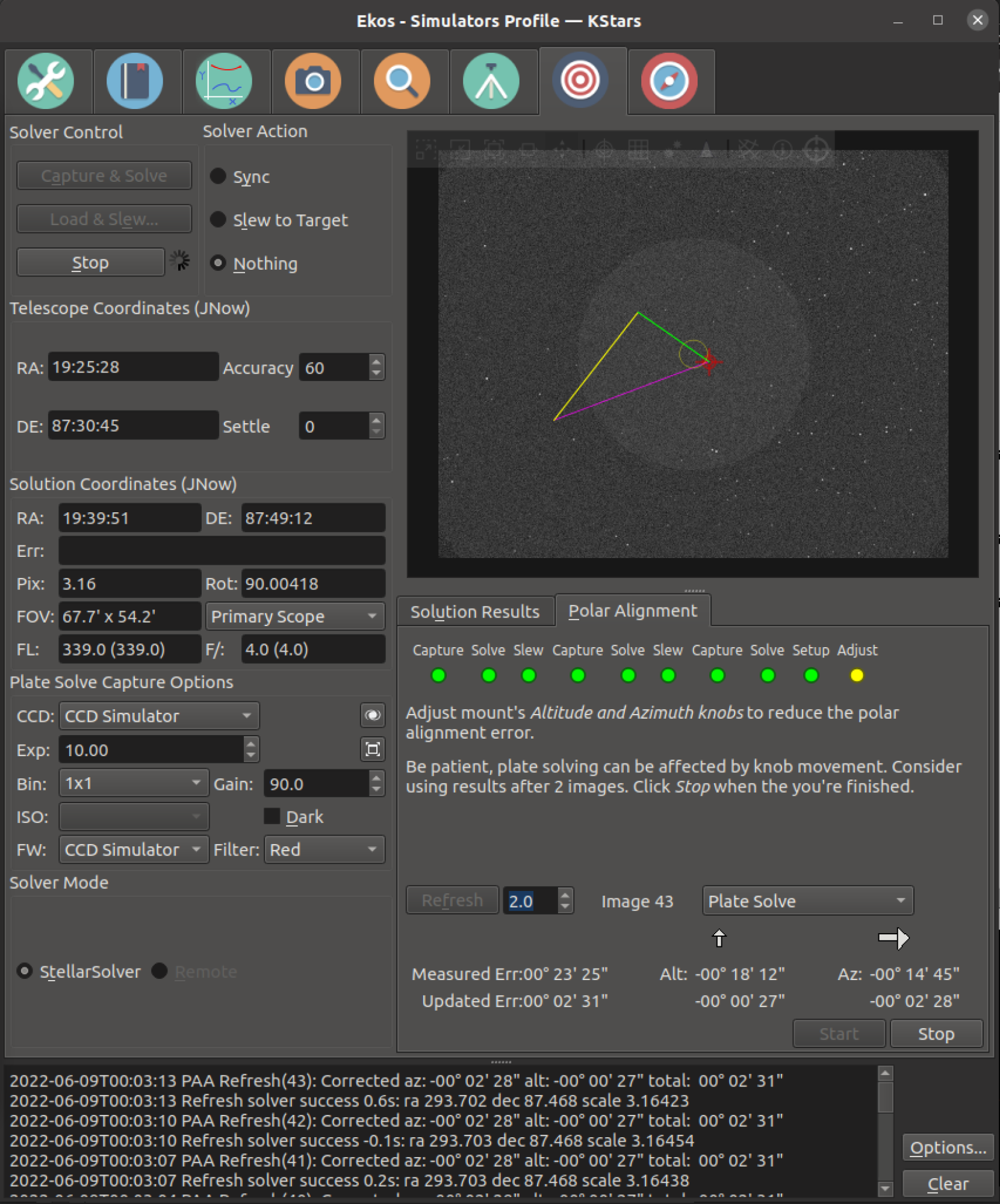
The user has adjusted the Azimuth knob to significantly reduce the Az error (from 14'45" to 2'28").
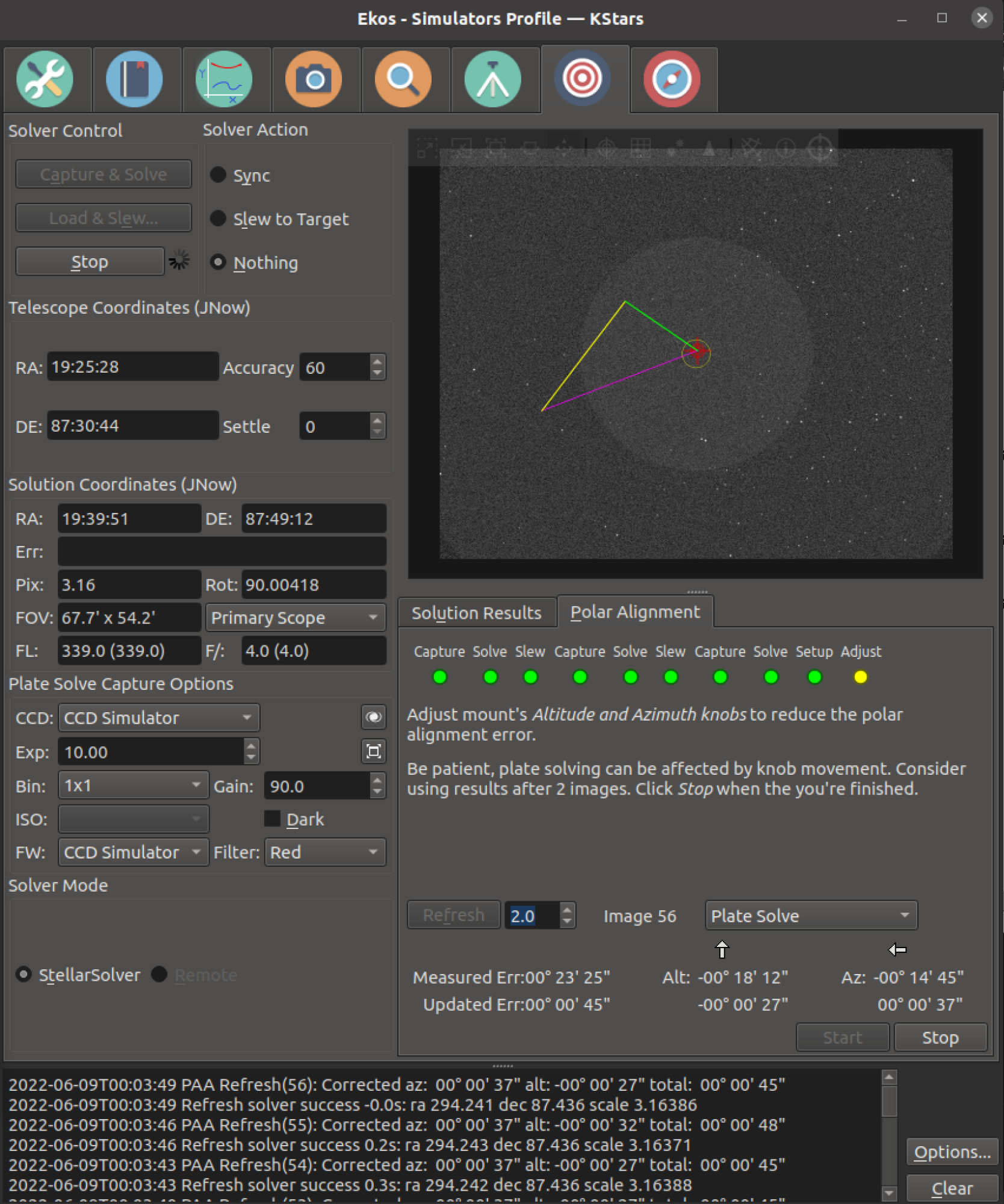
The user has reduced both errors significantly less than 1'. At this point the user should click Stop.
Attachments:
Please Log in or Create an account to join the conversation.
- Ron Clanton
-

- Offline
- Elite Member
-

- Posts: 225
- Thank you received: 16
Replied by Ron Clanton on topic Announcing Polar Alignment Changes
This looks very promising! Looking forward to trying the new method.
Thanks!
Ron
Please Log in or Create an account to join the conversation.
- Rafa Barberá
-

- Offline
- Elite Member
-
- Posts: 219
- Thank you received: 41
Replied by Rafa Barberá on topic Announcing Polar Alignment Changes
")
Please Log in or Create an account to join the conversation.
- Gonzothegreat
-

- Offline
- Moderator
-

- Posts: 2257
- Thank you received: 223
Replied by Gonzothegreat on topic Announcing Polar Alignment Changes
I would have the arrows change to a green circle when the polar alignment is within tolerances.
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-

- Away
- Administrator
-
Replied by Jasem Mutlaq on topic Announcing Polar Alignment Changes
Please Log in or Create an account to join the conversation.

Replied by Jim on topic Announcing Polar Alignment Changes
Please Log in or Create an account to join the conversation.

Replied by Bill on topic Announcing Polar Alignment Changes
As far as blind plate solving, would you uncheck in Scale and Position the RA and DEC vs leaving that and entering 0? (As read in another thread)..
Also would it be proper to leave the corresponding . update check marks in place?
A side question, are nightly builds equivalent to bleeding builds?
Thx
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Online
- Administrator
-
- Posts: 1226
- Thank you received: 566
Replied by Hy Murveit on topic Announcing Polar Alignment Changes
Personally, I tend to use Scale and Position if I'm using the Internal Solver, and I tend to disable (uncheck) them if I use ASTAP, and I tend to use both.
However, if plate solving is not working well, and other things look good (focus, weather), then I'd disable scale and position.
I'm not familiar with the "entering 0" advice, haven't heard about that.
I would keep both update checkboxes checked.
Yes, I think "nightly builds" == "bleeding edge builds".
Hy
Please Log in or Create an account to join the conversation.
Replied by Bill on topic Announcing Polar Alignment Changes
That advice was in this thread:
indilib.org/forum/general/11826-nexstar-11-alignment.html#83567
Please Log in or Create an account to join the conversation.
- Gilles Gagnon
-

- Offline
- Elite Member
-
- Posts: 294
- Thank you received: 54
Replied by Gilles Gagnon on topic Announcing Polar Alignment Changes
I had the opportunity to test the "Plate Solve" mode yesterday as my PA was off by more ( > 2 degrees ) than my CCD field of view but the "Updated Err:" stop updating/refreshing after a few iterations and even disappeared. Any clue as to why this happened?
Thanks in advance.
Please Log in or Create an account to join the conversation.

Replied by Andrew on topic Announcing Polar Alignment Changes
"Note that, since knobs may be moved during exposures, some images may have large star trails and plate solves may fail. Be patient and allow the system to capture a clean image before relying on the error estimate."Please Log in or Create an account to join the conversation.